- 下肢障害者・高齢者の日常生活環境での移動を支援する技術
- 把持動作支援用ハンド
- 衣類抵抗に対する歩行運動生成メカニズム
- 操作性に優れたレーザポインタ
- リハビリテーション装置
1. 下肢障害者・高齢者の日常生活環境での移動を支援する技術
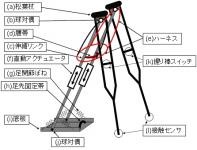
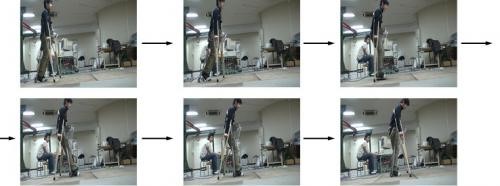
(1) 松葉杖形歩行支援装置の機構と制御
下肢障碍者が直立姿勢を維持したまま歩行を行えるよう,下肢対麻痺者・片麻痺者向けの歩行支援機械を開発しています.本装置を使用することで,連続的な歩行のみならず段差の乗り越え・下降動作も実現可能であることを実験により確認しているほか,ドイツ・デュッセルドルフにて開催された福祉機器展示会(Rehacare2012)等にて展示を行い,ご好評を頂いています.


文献:
- 佐藤秀太・武田行生・樋口勝:松葉杖形歩行支援機械の開発,日本機械学会2008年度年次大会講演論文集(7)[2008.8.3~7,横浜市], 2008, pp.207-208.
- Masaru HIGUCHI, Makoto OGATA, Shuta SATO, and Yukio TAKEDA, Development of a walking assist machine using crutches (Composition and basic experiments), Journal of Mechanical Science and Technology 24 (2010), pp. 245-248.
- Tatsuro Iwaya, Yukio Takeda, Makoto Ogata, Masaru Higuchi, Development of a Walking Assist Machine Using Crutches – Motion for Ascending and Descending Steps, New Trends in Mechanism Science – Analysis and Design, Mechanism and Machine Science 5, Springer, 2010, pp. 319-326.
(2) 移動を支援する支持物の設計
アクチュエータを使わない杖等の支持物と人体をひとつの運動系と捉え,移動時の人体への付加を低減可能な最適な杖先形状を取得可能とする運動解析・設計手法の開発を行っています.
文献:
- 松田聡一郎,武田行生:高齢者の安定歩行のための支持物の形状設計:第1報,支持物によるバランス復帰特性の評価,日本機械学会 [No. 10-53] シンポジウム:スポーツ・アンド・ヒューマン・ダイナミクス2010 講演論文集 pp. 248-253
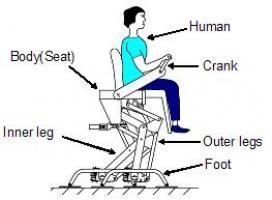
(3) 歩行椅子
車椅子の代替手段として使用可能で,段差の乗り越えも可能な移動支援装置の機構の開発を行いました.
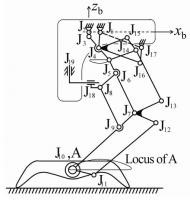
(3)-1. 歩行椅子の駆動系


仕様:
質量: 88kg(試作機III),37kg(試作機IV)
大きさ: 760(W)×925(H)mm
駆動源: 通常歩行用に1つ,段差等への対応用に4つ用いる.
特徴: 微小の段差への対応は軽量ブレーキ(下記参照)により行い,特別な制御を必要としない.
文献:
- 川渕一郎・武田行生・舟橋宏明:遊脚足部の着地時刻の早まり/遅れ情報に基づく歩行機械の対地適応機構の研究(第1報,適応アルゴリズムの提案と脚機構の構成),日本機械学会論文集C編,65-630(1999-2),pp.850-855.
- Hiroaki FUNABASH, Yukio TAKEDA, Ichiro KAWABUCHI and Masaru HIGUCHI : Development of a Walking Chair with a Self-Attitude-Adjusting Leg Mechanism for Stable Walking on Uneven Terrain, Proceedings of the Tenth World Congress on the Theory of Machines and Mechanisms, Oulu, Finland, June 20-24, 1999, pp.1164-1169.
- 樋口勝・武田行生・舟橋宏明・松下知己:遊脚足部の着地時刻の早まり/遅れ情報に基づく歩行機械の対地適応機構の研究(第2報,対地適応機構を有する歩行機械の動特性),日本機械学会論文集C編,69巻,679号,2003, pp.788-795.
- 樋口勝・舟橋宏明・武田行生・山田貴詩・沖善成・塚田雅士:歩行椅子の開発(基本構成とパワーアシスト駆動系の基礎的研究),日本機械学会2001年度年次大会講演論文集(III)[2001.8.27-30, 福井市],pp.259-260.
- 清水和紀・村井勉・沖善成・舟橋宏明・武田行生・樋口勝:歩行椅子の開発(軽量化プロトタイプの設計・製作),日本機械学会2001年度年次大会講演論文集(III)[2001.8.27-30, 福井市],pp.261-262.
- Yukio TAKEDA, Masaru HIGUCHI, Hiroaki FUNABASHI, Yoshinari OKI and Kazunori SHIMIZU, Development of a walking chair (Fundamental investigations for realizing a practical walking chair), Proc. 4th Int. Conf. on Climbing and Walking Robots (CLAWAR2001), Karlsruhe, Germany, 24-26 September 2001, pp.1037-1044.
- Yukio Takeda, Hiroaki Funabashi and Masaru Higuchi : Walking Chair as a Welfare Robot, JSME News, 12-2(2001), pp.4-5.
- 武田行生・樋口勝,歩行椅子の研究開発,設計工学,42巻3号,2007年3月,pp.126-134.
(3)-2. 軽量ブレーキの開発
上記の歩行椅子等に使用するための,軽量かつ大きな制動力を発生可能な新しいブレーキ機構を開発しました.

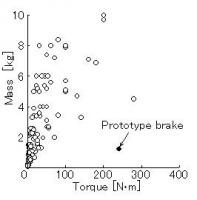
仕様:
最大トルク: 240Nm
質量: 1.2kg
駆動方法: ソレノイド(粗動)+ピエゾアクチュエータ(微動)
文献:
- 舟橋宏明・樋口勝・川渕一郎・武田行生:ロボット用ブレーキの開発(第1報,圧電アクチュエータとソレノイドを併用したブレーキの提案),日本機械学会論文集C編,68巻673号, 2002, pp.2730-2735.
- 樋口勝・舟橋宏明・武田行生:ロボット用ブレーキの開発(第2報,ソレノイド駆動くさび機構の特性),日本機械学会論文集C編,68巻673号, 2002, pp.2736-2742.
- Masaru HIGUCHI, Hiroaki FUNABASHI and Yukio TAKEDA: Development of a Light-weight Brake driven by a PZT actuator for Robotic Application, Proceedings of 6th International Conference on Mechatronics Technology, September 29 – October 3, 2002, Kitakyushu Science Park, Kitakyushu, Fukuoka, Japan, pp.394-399.(Best paper awardを受賞)
- 樋口勝・武田行生・舟橋宏明:ロボット用ブレーキの開発(第3報,製作・組立誤差と作動力の関係),日本機械学会論文集C編,72巻723号,2006, pp.3641-3648.
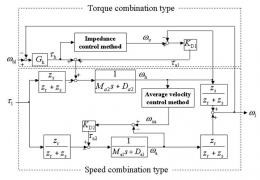
(3)-3. パワーアシスト駆動系の開発
上記の歩行椅子について,使用者の腕を使った入力をアシストする手法等の運動制御手法を開発しました.
文献:
- 樋口勝・武田行生・舟橋宏明・山田貴詩・松本貴弘:歩行椅子用パワーアシスト駆動系の開発(定常歩行に対するパワーアシスト駆動系の基礎的研究),日本機械学会論文集C編,69巻,683号,2003, pp.1885-1891.
- Yunfeng Wu, Masaru Higuchi, Yukio Takeda and Koichi Sugimoto, Development of a Power Assist System of a Walking Chair (Proposition of the Speed-Torque Combination Power Assist System), Journal of Robotics and Mechatronics, Vol.17, No.2, 2005, pp.189-197.
- Yunfeng WU, Hitoshi NAKAMURA, Yukio TAKEDA, Masaru HIGUCHI and Koichi SUGIMOTO, Development of a Power Assist System of a Walking Chair Based on Human Arm Characteristics, Journal of Advanced Mechanical Design, Systems, and Manufacturing, Vol. 1, No. 1, 2007, pp. 141-154.
リウマチ等の疾病や腱の損傷などにより手指の関節の可動範囲が限定されている使用者が,日常生活を送る上で不可欠な物体の把持動作を自力で行えるよう,把持動作を代替する義手の開発を行っています.具体的な開発項目としては,限定された可動範囲内での使用者の手指の運動軌道から所望の把持動作を推定する手法,義手の把持動作を生成する運動制御手法および力覚提示機能を有する義手機構の開発を行っています.
人間の各関節には固有の剛性があり,日常動作においては無意識下でこれを考慮した運動生成が行われています.そのため,著しく関節の剛性が変わるような衣服を着用すると意図したとおりの動作ができなくなります.本研究では宇宙服を例として,意図した動作の実現を妨げない最適な関節剛性の設計手法を提案しました.
文献:
- 北 晃治,武田行生:宇宙服膝部抵抗に対する立位姿勢決定要因の解析,日本機械学会 [No. 10-53] シンポジウム:スポーツ・アンド・ヒューマン・ダイナミクス2010 講演論文集,2010, pp. 122-127.
人間の身体動作には,振戦と呼ばれる緊張等の心理的な要因が引き金となる不随意な振動が含まれ,意図した動作の実現の妨げとなります.当研究室では,レーザポインタを例に振戦の影響を抑制しつつ意図した動作を実現可能とする運動計測と意思の推定およびアクチュエータの制御を行う運動制御系の開発を行っています.
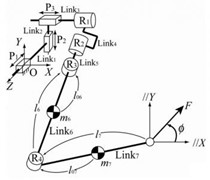
腱の損傷などにより関節の可動範囲が健常者より狭くなっている人のリハビリテーションに資する装置の開発を行っています.人間の複雑な関節の構造に対応しながらリハビリの状況に応じた負荷調節を可能としつつ,省入力自由度で簡便に使用可能な装置の開発を目指した研究を行っています.
文献:
- 古賀達也・ツォイ ユンホー・武田行生,パラレルメカニズムを用いたリハビリテーション装置の開発(制御系の構成),日本機械学会・ロボティクスメカトロニクス講演会2010講演論文集, 1A2-G23.
- Tatsuya KOGA, Yun Ho TSOI and Yukio TAKEDA, “Development of a joint rehabilitation ROBOT using parallel mechanism -Composition of the control system-”, Proc. the First IFToMM Asian Conference on Mechanism and Machine Science, October 21 – 25, 2010, Taipei, Taiwan (CD-ROM proc).