※本ページでは,公益財団法人JKA平成29年度研究補助「網状索道自走機構と構造可変型パラレルワイヤ機構の研究開発」の概要広報資料を掲載しています.
1 研究の概要
本研究補助事業では,自然環境や災害現場等における作業,見回り,物資運搬,調査,救助に有用な新たなフィールドロボットシステムの基礎技術を開発すべく,クモの巣のように相互接続することで空間的・曲線的に架設されたケーブルを軌道として利用し空間内を自走するロボットと,これを複数用いさらにここから繰り出した複数のケーブルによりエンドエフェクタを駆動する構造可変型直列・並列ハイブリッドパラレルワイヤ機構よりなる,信頼性の高く高速・高出力な作業移動ロボットを開発するための研究を行った.
2 研究の目的と背景
ドローンや不整地走行ロボットの技術の進歩は目覚ましいが,障害物の多い自然環境や災害現場等の非整備環境での運用は墜落やスタックのリスクがあり依然として容易でない.レールを敷設できればこういった環境の通行は容易となるが,敷設作業は大掛かりである.容易に架設できるケーブルを軌道として自走する機構は存在するが,ケーブルはこれが接続される2点間を直線(懸垂線)で結んでしまうため,障害物の多い狭隘な環境では使用できない.空間的・曲線的にケーブルを架設しこれを軌道として利用する自走式ロボットが実現できれば,山林内や災害現場等の非整備環境における物資運搬や見回りなどに有用と考えられる.
また近年注目されているパラレルワイヤ機構は,広い可動範囲を持ち高出力であるため災害救助への応用も提案されているが,凸多面体となる可動範囲内に障害物があるとケーブルが接触するため,障害物の多い自然環境や災害現場等の狭隘環境での使用は実際には困難である.障害物を避けた任意形状の可動範囲を持つパラレルワイヤ機構が実現できれば,障害物の多い自然環境や災害現場等における調査や救助,作業に有用と考えられる.
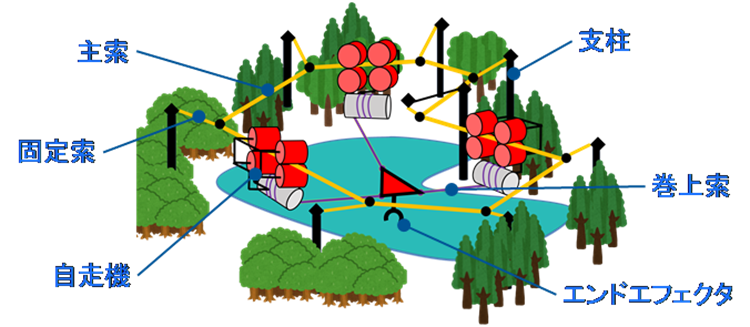
そこで本研究では,クモの巣のように相互接続することで空間的・曲線的(正確には折れ線的)に架設されたケーブル(網状索道,Spatially-structured cablewayと呼ぶ)を軌道として利用し空間内を自走するロボットと,これを複数用いさらにここから繰り出した複数のケーブルによりエンドエフェクタを駆動する構造可変型直列・並列ハイブリッドパラレルワイヤ機構を着想した(図1).具体的にはこれらに関する下記の研究開発を行うことにより,自然環境や災害現場等における見回り,物資運搬,調査,救助,作業に有用な,信頼性の高く高速・高出力な作業移動ロボットである新たなフィールドロボットシステムの基礎技術を開発することを目的とする.
3 研究内容
本研究は複数の研究項目に分かれており,各項目の実施内容について以下に示す.
3.1 網状索道走行機構の開発
網状索道を軌道として利用するにはケーブルの分岐点を越えて自走する能力が必要となる.この研究項目では,分岐点を越えて自走できる移動ロボットの機構と制御法を開発した.
まず,この索道自走ロボットの機能的要求の分析を行い,以下の機能が必要となることを明らかにした:
(A) 結び目を有するケーブルを自走する機能
(B) ケーブルの分岐点において進行方向を選択し,進行方向以外のケーブルに干渉せず進行する機能
まず(A)の機能の実現には,ケーブルを把持する部分(把持部)に,ケーブルの外径の変化に適応するSelf-Centering機構の採用を当初検討した.しかしながらその後のさらなる検討で,把持部を正確に中心に位置決めする必要は必ずしもないことがわかった.そこで再度把持部に必要な機能を検討したところ,以下の機能が必要となることが分かった:
(A-1) 主ケーブルを把持し駆動する機能
(A-2) 副ケーブルとの干渉を防ぐ機能
これらを満たす機構として,鼓形の断面を持つプーリを対向させた駆動機構を有する把持部を考案した(図2 (a)).これは重力によりケーブルを一対の鼓形のプーリで挟み込んで垂直抗力を増すことで摩擦係数の低いケーブルに対しても強い駆動力を発生させるものであり,またプーリ外周に副ケーブルの軸径と同径の半円状の隙間を等間隔で設けることにより,主ケーブルを確実に把持しながら副ケーブルとの結節点を乗り越えることが可能である.
次に(B)の機能の実現には,分岐点において駆動機構のプーリの隙間を副ケーブル方向に向けるため,把持部をRoll・Pitch・Yaw各軸回りに回転させる機構が必要になる.この際の回転中心はケーブル分岐点となるため,Remote-Center機構(RCM)が必要になる.これに関してはさまざまな原理の機構で実現可能であるが,具体的には平面機構,球面シリアル機構,球面パラレル機構について,可動範囲の面から検討を行った.その結果図2 (b)に示す3R球面シリアル機構を採用し,詳細設計を行った.この機構はある一つの点でその回転軸が交わる3つの能動回転対偶を直列に接続したもので,自走ロボット本体からこれを介して把持部を取り付けることで,あらゆる方向の副ケーブルをかわしながら走行することが可能になっている.
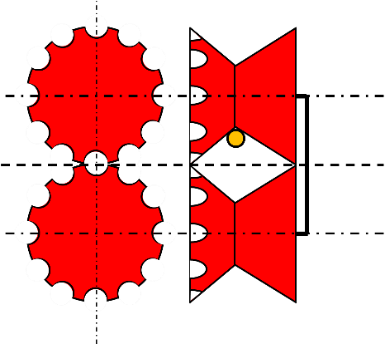
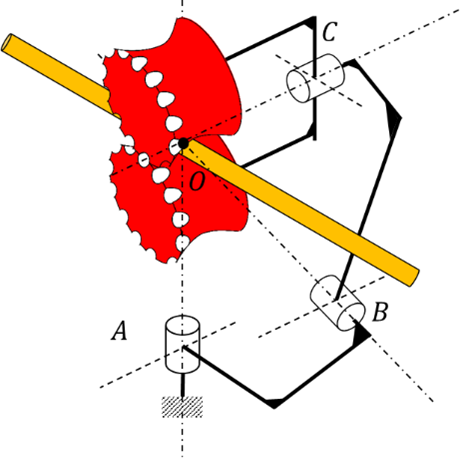
図2.駆動部の構造
この把持部とRCMを1つのみ備えるシングルアーム式網状索道自走ロボットTCC78S(Tokyo Tech Cableway Crawler – No. 78 Single Arm)を開発した(図3).シングルアーム式はプーリ駆動モータを含め3つのモータのみで構成可能であり,安価でシンプルである.
TCC78Sは,最大52 degの傾斜ケーブルの昇降,平面内では最大80 degの旋回角を有する副ケーブルへの進入,最大37 degの傾斜と最大75 degの旋回角を有する副ケーブルへの進入を実現している.
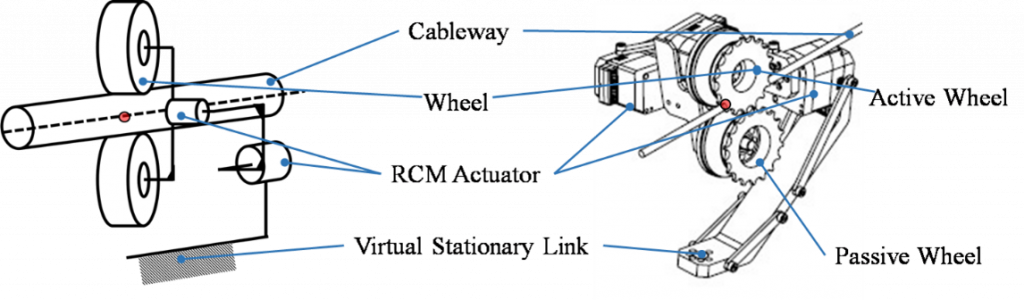
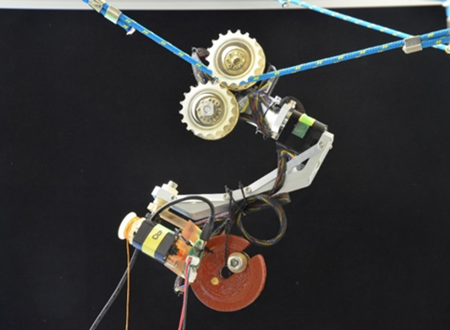
図3.シングルアーム式網状索道自走ロボットTCC78S
また,この把持部とRCMを前後に二つ備えるダブルアーム式網状索道自走ロボットTCC78D(Tokyo Tech Cableway Crawler – No. 78 Double Arm)を開発した(図4).ダブルアーム式は片方が結節点を乗り越えているときにももう片方が安定に主ケーブルを把持して駆動することが可能であり,安定性に優れている.
TCC78Dは,最大72 degの傾斜ケーブルの昇降,平面内では最大85 degの旋回角を有する副ケーブルへの進入,最大48 degの傾斜と最大63 degの旋回角を有する副ケーブルへの進入を実現している.
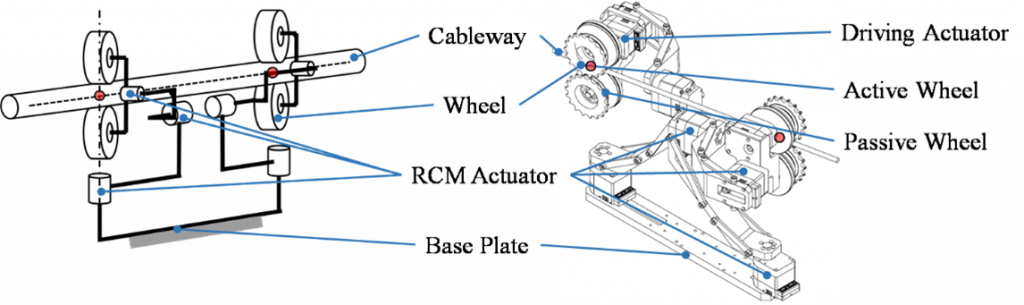
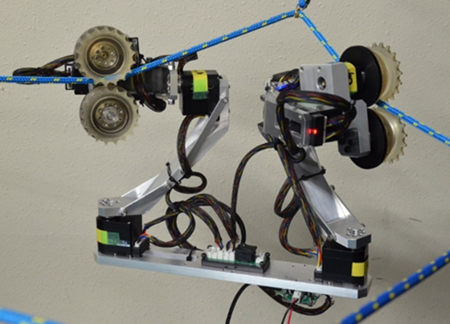
図4.ダブルアーム式網状索道自走ロボットTCC78D
3.2 網状索道の架設手法の開発
索道はあらかじめ設置された支柱(Supporting Pillar)と,支柱間に張り巡らされるケーブル上に設置される分岐点(Cable Knot)の間に設定できる.経路生成ではこれらの点を全て節点(Node)と設定し,節点間を結ぶ線分と環境の距離判定することにより,ケーブルと環境の接触を検出できる.これらは幾何学的に判定可能である.
索道走行時のロボットと環境との接触の有無については,ロボット自体の大きさを考慮する必要がある.予め走行可能な索道経路を生成する時,ロボットと環境の接触については逐一判定する必要があり,索道経路の決定後に別途判定することが一般的である.そのため接触があるため走行できない索道については探索的に繰り返し計算する必要がある.本研究ではこれに対してMinkowski和を用いて環境側にロボットの大きさを付与し,索道経路生成時においては,大きさを持たない点としてロボットを扱える手法を開発した.図5にシミュレーションの結果を示す.(a)に示すように移動する索道(図中黄色)にロボット(図中灰色四角)が存在するとき,環境(図中青色)に接触するかを考える.このとき,(b)に示すようロボットの大きさ分の余裕をMinkowski和により環境側に付与することで,ロボット自体は点として扱えるようになる.これにより,ロボットが大きさを持たない点として扱えるため,移動中などのオンライン時においての計算量を飛躍的に減少できる.
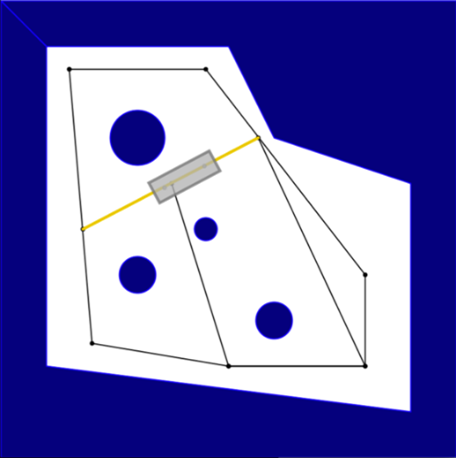
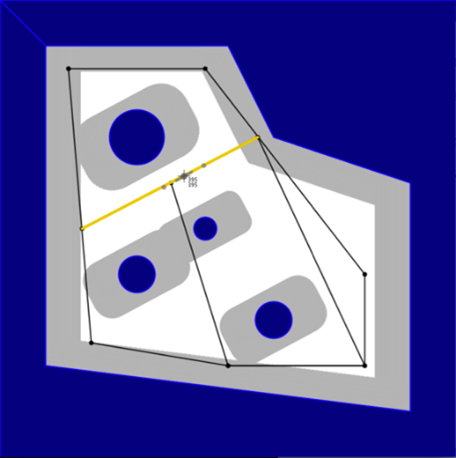
図5. Minkowski和によるロボットと環境の取扱の変換
加えて,障害物などの環境が与えられたとき索道を生成する手法および効率の良い移動経路を生成する手法を開発した.図6の(a)にシミュレーションで用いるランダムに障害物を配置した環境を示す.本手法では障害物を点として扱う.(b)に(a)の環境の障害物を点として表現したものを示す.本シミュレーションでは簡単のため,障害物を円として生成し,その中心点を代表点として採用した.
この障害物の点群を含む環境に索道を張る.索道はボロノイ図に基づいて設定する.ボロノイ図を用いることで,索道はすべての障害物から最も遠い点の集合となる.すなわち,ロボットが移動する上で障害物への接触する危険性を最も減らせる.(b)の環境にボロノイ図を適用したものを(c)に示す.また,その交点を割り出したものを(d)に示す.この交点が実際には節点となり,ケーブルの分岐点となる.
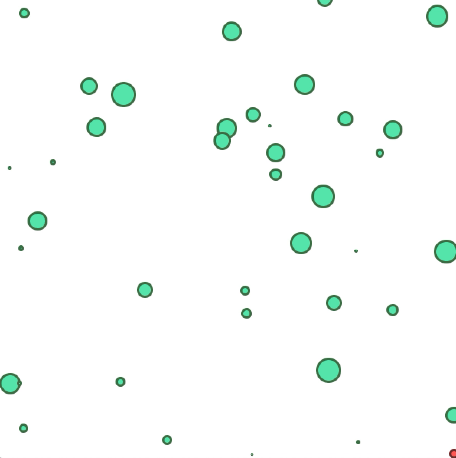

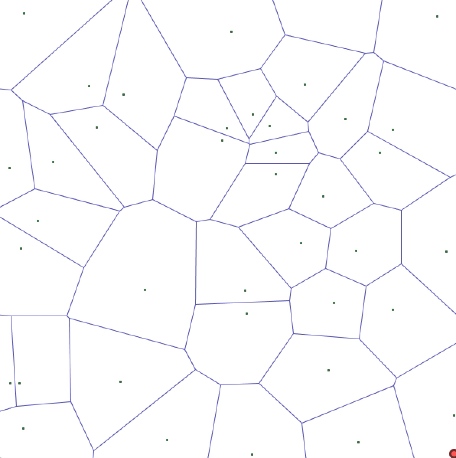
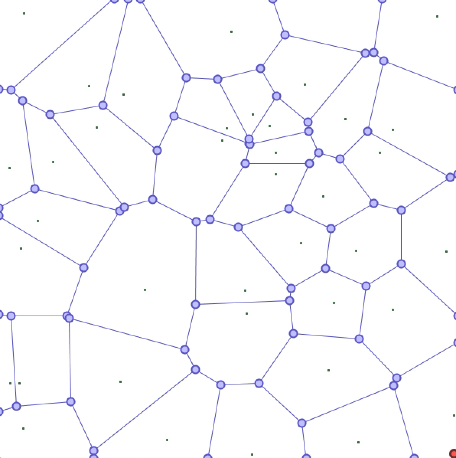
図6. フィールドに合わせた索道の生成
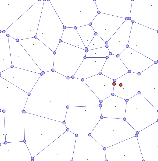
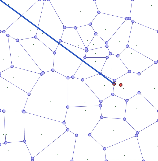
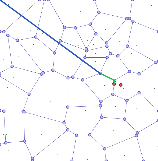
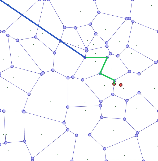
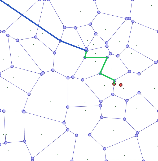
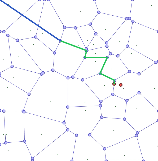
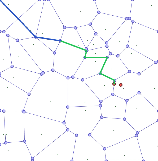
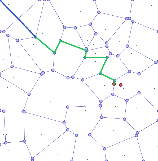
この索道に目標点を設定し,その点まで効率よく移動可能な索道の経路を選択する.図7に経路の生成を順をおって示す.まず,対象領域(a)に目標位置を設定する.提案するシステムはワイヤ索道上を移動する複数台のロボットに固定されたパラレルワイヤ機構によりタスクを実施する.そこで任意位置に目標点を設定した時,それを内包する索道の閉ループ構造にロボットの目的地が含まれる.本シミュレーションでは目標点を内包する索道の閉ループ構造内に目的地を設定するために目標点の索道上の最近点を目的地とする.その後,初期位置と目的地を結ぶ直線を生成し,その直線から最も近い節点を経路に含むとする.これを繰り返し,最終的に全ての経路が索道に合致するまで繰り返す.図の(c)から(o)までにこれらの繰り返し計算の過程を示す.直線を規範とすることで,どのステップのおいても節点間の最短距離を取ることとなり,最も移動距離が短い索道経路を選択できると言える.
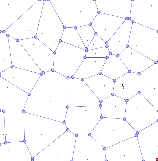 |  |  |  | 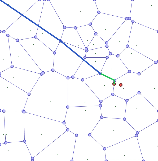 |
| (a) 対象領域 | (b) 目標の設定 | (c) 1ステップ | (d) 2ステップ | (e) 3ステップ |
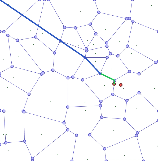 |  |  |  |  |
| (f) 4ステップ | (g) 5ステップ | (h) 6ステップ | (i) 7ステップ | (j) 8ステップ |
|  | 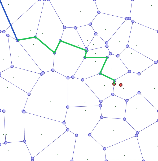 |  |  |
| (k) 9ステップ | (l) 10ステップ | (m) 11ステップ | (n) 12ステップ | (o) 13ステップ |
図7. 最短索道移動経路の生成
また,複数ワイヤを網の目に懸垂することで構築するロボットが移動する索道について,二次元で経路探索することを三次元に拡張すべく懸垂されたワイヤの懸垂曲線について検討した.具体的には,建築などの分野でワイヤの曲線をモデル化するカテナリ曲線と呼ばれる理論式に基づき計算した曲線が,実際に懸垂したワイヤをどの程度まで再現できるか,実験より検討した.実験は画像処理技術を用い,懸垂したワイヤを撮影・解析し,理論式から導出される曲線との誤差を比較した.実験よりワイヤの素材によってはその剛性や弾性からカテナリ曲線は誤差を持つが,理論式から導出される曲線は概ね実験結果と一致することがわかった.
今後は固定点から懸垂されるワイヤ上に結節点を持つワイヤ,さらにそのワイヤ上に結節点を持つワイヤと複合的に網目状に索道を構成されるワイヤを対象とし,カテナリ曲線を応用したモデルを用いることで結節点位置情報から索道が形成する3次元形状を推定するシステムとして構築していく.また,ロボットが索道上の任意点にあるときに,ロボットの自重による策動形状の変化について議論していく.
3.3 複数の索道自走ロボットによるパラレルワイヤ機構の開発
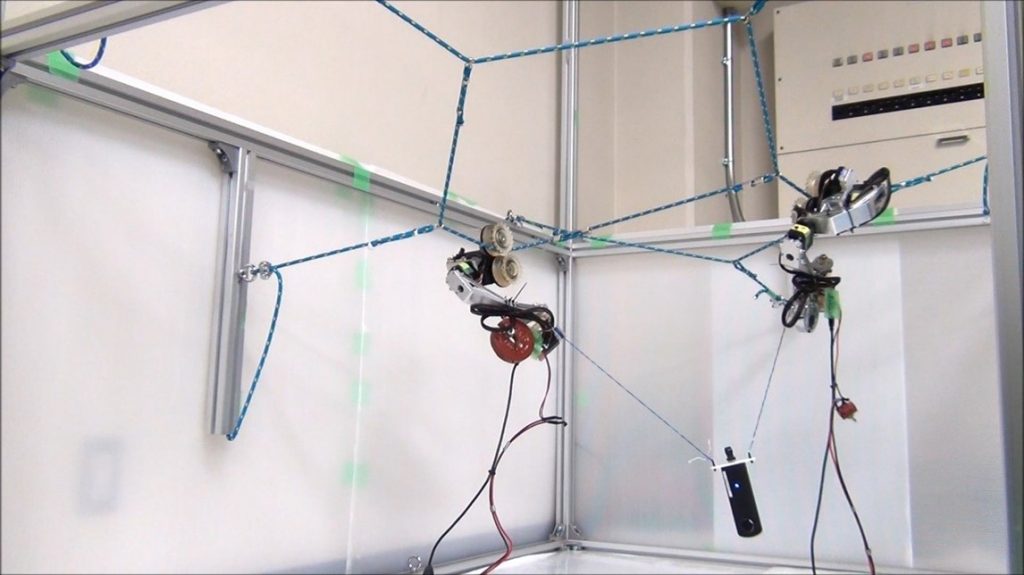
複数の索道自走ロボットからさらにケーブルを繰り出してエンドエフェクタに接続することで,可動範囲が凸多面体とならず障害物を避けた任意形状の可動範囲を持つ構造可変型直列・並列ハイブリッドパラレルワイヤ機構が構成できる.このコンセプトの実施例として,この研究項目では,3.1で述べた自走ロボットを2台用いた3自由度機構を試作した(図8).
この構造可変型ハイブリッドワイヤ機構は,空間的に構造化した網状索道上を走行する2台のシングルアーム式自走ロボットにそれぞれウインチを取り付け,これらより繰り出す2本のケーブルを用いてエンドエフェクタの位置決めを行うことができる.今回の試作機ではエンドエフェクタに全天球カメラを搭載し,自走ロボットの網状索道上の走行とケーブルの巻上・操出によるこれの位置決めを実現し,本研究で提案するコンセプトが実現可能であることを確認した.
4 本研究が実社会にどう活かされるかー展望
本研究の成果は,中長期的には,山林内や災害現場等の非整備環境における継続的な物資運搬や見回りなどに有用な,高効率・高速で信頼性の高い移動ロボットの実現,また障害物の多い自然環境や災害現場等における調査や救助,作業に有用な,高出力な作業移動ロボットの実現というイノベーションとなる.これらの技術は災害対応ロボットや廃炉作業ロボット,除染作業ロボット,自然環境モニタリングロボット,農林業用ロボットに応用可能であり,これらのロボットシステムの実用化のために本研究の成果は不可欠である.
実際,本研究の成果を踏まえ,テーマをさらに拡張し新たな共同研究者の参画も含めた研究計画で2019-2020年度の公益財団法人JKA研究補助に応募し,交付決定を頂いている.これは本研究の成果をベースに山林等自然環境での物資の自動運搬や環境モニタリングなどのための実用技術へとブラッシュアップする計画であり,更なる成果が期待できる.
また本研究の成果に興味を持っている企業もあり,早期の実用化も期待できると考えている.
5 教歴・研究歴の流れにおける今回研究の位置づけ
研究代表者の菅原雄介はロボットシステム設計学の構築と展開をライフワークとしており,この中で「網状索道自走ロボット」と「構造可変型ハイブリッドワイヤ機構」は,まったく新たなロボットシステムの提案を行うという意味で大きな意味のあるものである.また,パラレルワイヤ機構を軌道上を自走する作業移動ロボットとして応用するコンセプトは特に,ドローンやSLAMなど最近急速に発展してきているフィールドロボティクスの分野に対するメカニズム研究者としての挑戦である.
共同研究者の遠藤央は持続可能性をキーワードとしたロボット技術の応用に取り組んでおり,本研究は,環境等の持続可能性に関連して,湖沼や森林のモニタリング等への応用が可能である.また,ワイヤの特性に着目したパラレルワイヤ機構の研究や移動ロボットを用いたシステムの研究に取り組んでおり,基礎的な技術の応用対象としての技術開発として重要である.
6 本研究にかかわる知財・発表論文等
【知財】
無し(1件を出願準備中)
【論文・国際会議】
| 1. | Daisuke Matsuura, Taishu Ueki, Yusuke Sugahara, Minoru Yoshida and Yukio Takeda, Reproduction of Long-Period Ground Motion by Cable Driven Earthquake Simulator Based on Computed Torque Method, Proc. of the Fourth International Conference on Cable-Driven Parallel Robots, Krakow, Poland, 2019.(印刷中) |
【国内会議予稿】
| 2. | Randy Raharja Sudiono, Yusuke Sugahara, Mitsuru Endo, Daisuke Matsuura and Yukio Takeda, Cable Traversing Robots on Spatially Structured Cableway for Reconfigurable Parallel Cable System,日本機械学会ロボティクス・メカトロニクス講演会2019,広島県,2019年6月.(印刷中) |
| 3. | 上木泰修,松浦大輔,菅原雄介,吉田稔,武田行生,パラレルワイヤ式地震動シミュレータの計算トルク法による制御と長周期地震動の再現,第36回日本ロボット学会学術講演会予稿集,2K1-04,愛知県,2018年9月. |
| 4. | 谷沢蒼太郎,相樂森,渡辺敦士,遠藤央,菅原雄介,武藤伸洋,柿崎隆夫,市販電動リールを活用したトルク調整式高出力ワイヤリールロボット,日本機械学会ロボティクス・メカトロニクス講演会2018,福岡県,2A1-J12,2018年6月. |
| 5. | 谷沢蒼太郎,遠藤央,菅原雄介,武藤伸洋,柿崎隆夫,懸垂型パラレルワイヤ機構による位置決めに関する研究(過拘束型/懸垂型の構成が変更可能なパラレルワイヤ実験装置),第18回計測自動制御学会システムインテグレーション部門講演会(SI2017),宮城県,pp. 557-559,2017年12月. |
| 6. | 相樂森,遠藤央,菅原雄介,武藤伸洋,柿崎隆夫,懸垂型パラレルワイヤ機構による位置決めに関する研究(ワイヤのたるみに着目した物体の状態判別),第18回計測自動制御学会システムインテグレーション部門講演会(SI2017),宮城県,pp. 560-563,2017年12月. |
【招待講演など】
| 7. | 菅原雄介,松浦大輔,武田行生,高精度パラレルメカニズムの開発,近畿大学大学院総合理工学研究科学際研究,大阪府,2018年4月. |
| 8. | 菅原雄介,松浦大輔,武田行生,高精度パラレルメカニズムの開発,第7回可視赤外線観測装置技術ワークショップ,京都府,2017年11月. |
| 9. | 菅原雄介,人を支援するロボットシステム~設計・制御・インテグレーション~,大田区産業振興協会第89回東京工業大学技術セミナー,東京都,2017年8月. |
7 補助事業に係る成果物
(1)補助事業により作成したもの
無し
(2)(1)以外で当事業において作成したもの
前述の発表論文等
8 事業内容についての問い合わせ先
所属機関名:東京工業大学
(トウキョウコウギョウダイガク)
住 所:〒152-8552
東京都目黒区大岡山2-12-1(i6-15)
申 請 者:准教授 菅原雄介(スガハラユウスケ)
担当部署: 工学院 機械系 機能システム学分野
(コウガクイン キカイケイ キノウシステムガクブンヤ)
E-mail: sugahara@mech.titech.ac.jp
URL: http://www.msd.mech.e.titech.ac.jp/