(1) ワイヤ駆動型連続体ロボット
文献
- Daisuke Matsuura, Ryota Shioya, H. Harry Asada and Yukio Takeda, An Extendable Continuum Robot Arm Using a Flexible Screw as a Backbone to Propel Inside a Confined Space with Discontinuous Contact Area, Proc IMechE Part C: J Mechanical Engineering Science, 2022, Vol. 0(0) 1 -12, DOI: 10.1177/09544062221080009
- 塩谷 崚太, 松浦 大輔, 菅原 雄介, 武田 行生. 広い作業領域を有するワイヤ駆動型連続体ロボットの開発(姿勢角の作業領域に着目した1セグメント連続体ロボットの機構設計), 日本機械学会論文集, Vol. 88, No. 915, p. 22-00205, Oct. 2022.
(2) 弾性ロッド駆動型連続体ロボット
文献
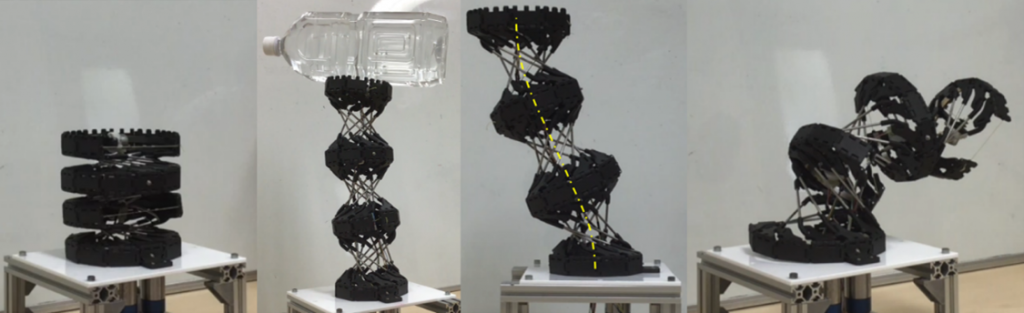
- Lei, Y., Sugahara, Y., Takeda, Y. (2022). Design and Inverse Kinematics of a Novel Tendon-Driven Continuum Manipulator Capable of Twisting Motion. In: Altuzarra, O., Kecskeméthy, A. (eds) Advances in Robot Kinematics 2022. ARK 2022. Springer Proceedings in Advanced Robotics, vol 24. Springer, Cham. https://doi.org/10.1007/978-3-031-08140-8_25
- Yuhang Lei, Ming Jiang, Yusuke Sugahara, and Yukio Takeda. (2023). Three-Actuated-DOF Parallel Continuum Robot with High Twisting Performance: Cosserat Rod-Based Kineto-Static Modeling and Simulation. In: Okada, M. (eds) Advances in Mechanism and Machine Science. IFToMM WC 2023. Mechanisms and Machine Science, vol 147. Springer, Cham. https://doi.org/10.1007/978-3-031-45705-0_62
(3) 狭隘空間での力作業が可能な連続体伸展アーム 折り紙に着想を得た多自由度剛体伸展アーム
(4) その他の展開・適応機構