※本ページでは,公益財団法人JKA2021年度研究補助「網状索道自走機と投擲・被投擲機による相互接続型構造可変ケーブルロボットシステムの研究」の概要広報資料を掲載しています.
1 研究の概要
本研究補助事業では,平成29・30年度,31・令和2年度研究補助で提案し開発してきた網状索道自走ロボットと構造可変型ワイヤロボットのコンセプトを拡張し,これに加えケーブルの投擲により環境に索道を架設する投擲ロボット,ケーブルをけん引しながら投擲される被投擲ロボットにより構成される分散・相互接続型構造可変ケーブルロボットシステムを提案し,自走機の機構と制御,索道生成法,投擲ロボット,被投擲ロボット,協調動作生成・制御法などの要素技術とそのフレームワークを開発するための研究を行った.
2 研究の目的と背景
研究代表者らは,平成29年度研究補助事業(複数年)において,クモの巣のように相互接続することで空間的・曲線的に架設されたケーブル(網状索道と呼ぶ)を軌道として利用し空間内を自走するロボット,網状索道自走ロボットを提案した.また,これを複数用いさらにここから繰り出した複数のケーブルにより手先効果器を駆動する構造可変型直列・並列ハイブリッドパラレルワイヤロボットを提案し,平成31年度研究補助事業(複数年)においてフィールドロボットとしての実用技術開発を進めてきた.
ここで新たに問題となるのは,如何に環境に索道を構築するかということである.これまでは作業者が手動でケーブルを架設し網状索道を構築することを前提としていたが,ケーブルの架設と網状索道の構築は作業者が手動で行うことを前提としているため,人間が近づくことが容易でない環境での運用は不可能であった.ロボットが自動でこれを構築できれば,人間が近づくことが容易でない環境においても運用可能になる.
そこで本研究では,これらの網状索道自走ロボットと構造可変型ワイヤロボットのコンセプトを拡張した,分散・相互接続型構造可変ケーブルロボットシステム(Distributed reconfigurable robot system interconnected by cables)を提案する.これは網状索道自走ロボットに加えて,ケーブルの投擲により環境に索道を架設する投擲ロボット,ケーブルをけん引しながら投擲される被投擲ロボットより構成され,これらにより非整備環境における網状索道の自動構築とこの上の自走,ここからの降下による索道下への位置決め等を行うことができるフィールドロボットシステムである.
本研究では,自走機の機構と制御,索道生成法,投擲ロボット,被投擲ロボット,協調動作生成・制御法などの要素技術とそのフレームワークを開発することを目的とした.
3 研究内容
本研究の計画は複数の研究項目に分かれており,各項目の実施内容について以下に示す.
① 網状索道自走機の最適化設計
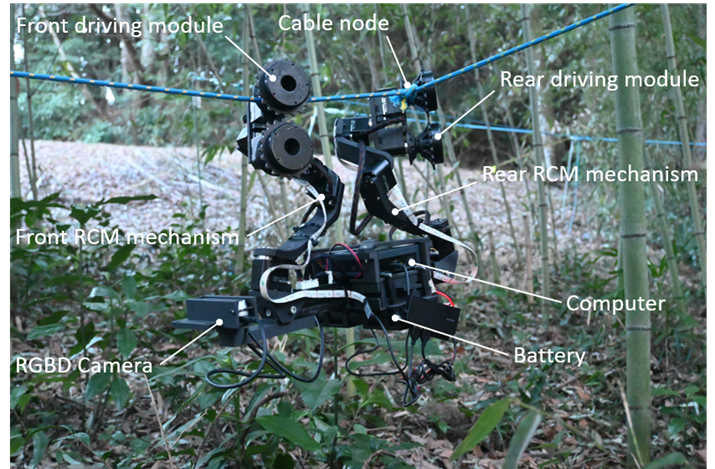
本研究より開始した,実際の屋外環境での運用研究のために,高い運動性能と信頼性を実現する網状索道自走機の機体設計を行った(図1,2).また野生動物の生態調査に利用する運用実験を開始した.なおこの実験は2022年7月に北海道・利尻島にて早稲田大学人間科学部野生動物生態学研究室(風間健太郎准教授)によるウミネコ生態調査の一環として実施した.ウミネコの雛鳥に最短50 cm程度まで近接して並走しながらの撮影に成功した.ロボットの動作音は小さく,ウミネコが警戒する様子は見られなかった(ビデオ1).

② 網状索道の生成手法の開発
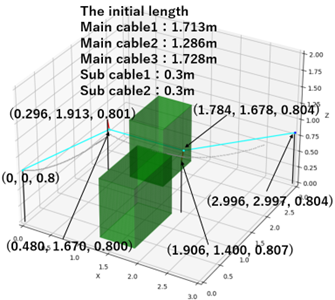
ケーブルを相互に接続し空間的に架設した索道上を走行する自走式ロボット(網状索道自走機)を新たな環境で運用するためには,空間内のスタート地点・ゴール地点の位置や,障害物の位置・大きさから,自走機が完走できる網状索道の張り方を決定する必要がある.ここでは,Q-RRT*により複数の経路候補を生成後,それぞれについてこれを実現するケーブルの張り方を求め,次に弾性カテナリーモデルに基づいて走行時の張力とケーブル変形量を導出することで,自走機が完走できる網状索道を求め,さらにその中から結び目を乗り越える時間や経路の総距離から判断して最適解を選択する手法を開発した.
この手法の妥当性を実験とシミュレーションにより検証した.図3に障害物が2個の場合の主索と副索,走行中の自走機の代表点の計算結果例,ビデオ2にこの索道を実際に走行させた実験の様子を示す.
③ ケーブル投擲ロボットの研究開発
本研究開発項目では索道の架設などをロボットにより自律的に実現するために,ケーブル投擲の数理モデルの構築,モデルに基づく投擲動作制御,および,ケーブル投擲ロボット実験装置のプロトタイピングに取り組んだ.モデル化では従来構築したモデルにおける種々のパラメータを実験結果に基づき同定し,その妥当性を確かめた.また,その数理モデルを利用し非線形制御により投擲を実現するためのロボットの制御手法を構築した.具体的には入出力線形化と出力零化制御を用いる.さらに,これらのモデルおよび制御手法の有効性を確かめるための柔軟節を持つ3自由度平面シリアルリンクマニピュレータの開発を進めた.
マニピュレータによる投擲運動の計算結果例をビデオ3に示す.
④ ケーブル牽引・被投擲ロボットの研究開発
本研究開発項目では,ケーブルを投擲して索道を架設する際に問題となるケーブル端部を環境内の何らかの物体へ固定する方法に関して,ケーブル先端に取り付け可能な被投擲ロボットによって問題を解決することを試みた.具体的には,対象物表面の凹凸を把持するための複数の爪を,無線操作によって開閉可能する機構を備えた小型被投擲ロボットを開発した.
被投擲ロボットの実験の様子をビデオ4に示す.
⑤ 網状索道自走ロボットの索道計測・制御法
網状索道自走機を自律走行させるために,可視光を利用することなく分岐点の位置と索道の角度を認識し,索道から脱輪しない動作を自律的に計画し,安定した速度で分岐点を通過する制御法を開発した.まず,十分な摩擦力を得られるよう索道に張力を与え,脱輪しにくい分岐点通過動作の目標軌道を計画する手法を開発した.次に,IMUとDepth画像を用いて分岐点の位置と索道の角度を推定するアルゴリズムを開発した.さらに,これらのパラメータの時間変化から自走機の走行速度を推定し,分岐点を通過する動作の開始タイミングを決定するアルゴリズムを開発した.
屋外に架設した複数の分岐点を有する網状索道を周回する実験の様子をビデオ5~7に示す.ビデオ5は昼間の太陽光下での走行,ビデオ6は夜間に投光器で照明を当てた状態での走行,ビデオ7は夜間に照明を当てない状態での走行実験の様子である.いずれも分岐点を誤認識することなく15分間の連続稼働,14回の分岐点通過に成功した.この時のDepthカメラの映像をビデオ8に示す.分岐点の背後に木が写り込むような状況でも問題なく分岐点を認識できた.
また,早稲田大学所沢キャンパス内の山林にて同様の実験を行った様子をビデオ9~12に示す.中間,夜間ともに分岐点を自動で認識し継続して走行することが可能であった.
さらに,分岐点通過の動作計画について,従来は駆動部の経路が2つの直線でモデル化されていたのに対し実際には駆動部が曲線的な経路を走行することに注目し,車輪に設けられた溝がケーブルに嵌まりながら走行するときの経路と,ここから外れながら走行するときの経路とを組み合わせることで曲線的な経路を生成する手法を開発した.また,前後の駆動部の一方の位置・姿勢からもう一方の位置・姿勢を求める手法を開発した.これらを組み合わせることで,前後の駆動部が機構学的な拘束条件を満たしながら曲線的な軌道を通るようになり,駆動輪を停止することなく滑らかに分岐点を通過できるようになった.
⑥ 網状索道の生成手法の拡張・⑦ 協調的再構成動作生成・制御法
網状索道の生成手法を拡張し,投擲や降下による網状索道の拡張を含む網状索道を自動で構築するためのケーブル自動結束装置を開発した.まず,主索に対して止め結び(一重結び)を作成することで副索を生成するための手動式原理検証モデルを設計・製作し,主索に対して止め結びが作成できることを確認した.次に,自動でケーブルを結束するための電動式自動結束装置を設計・製作し,動作検証を行った.
⑧ 発展的研究開発項目
発展的研究開発項目として,原理の異なるケーブル投擲ロボットに関する三種類の要素技術について,試作と検討を行った.とくにケーブルの張力の制御により環境への着脱が可能なアンカーについて,その原理考案とシミュレーションと実験による基本機能の実験的検討を行った.
4 本研究が実社会にどう活かされるか-展望
本研究の成果は,中長期的には,山林内や災害現場等の非整備環境における継続的な物資運搬や見回りなどに有用な,高効率・高速で信頼性の高い移動ロボットの実現,また障害物の多い自然環境や災害現場等における調査や救助,作業に有用な,高出力な作業移動ロボットの実現というイノベーションとなる.これらの技術は災害対応ロボットや廃炉作業ロボット,除染作業ロボット,自然環境モニタリングロボット,農林業用ロボットに応用可能であり,これらのロボットシステムの実用化のために本研究の成果は不可欠である.
本研究の成果を踏まえ,テーマをさらに拡張した「複数ロボット相互接続型可変構造・可展開ケーブルロボットシステムの研究」と題する研究計画を立案し,2023-2024年度の研究補助(複数年研究)に応募したところ,交付を頂き研究を開始している.これは本研究の成果をベースにそのコンセプトを拡張し,複数の自走機,投擲機,被投擲機,ケーブル自動結束機により構成され,索道構造を自動構築しこの上の自走,投擲・結束・取付による索道構造の展開,これを用いた位置決めなどを行うことができる複数ロボット相互接続型可変構造・可展開ケーブルロボットシステム(Reconfigurable-Deployable cable-interconnected multi-robot system)を提案する計画であり,更なる成果が期待される.
実用化については,引き続き野生動物のモニタリング運用実験を継続しているほか,複数の分野について企業からの応用研究のオファーを頂いており,早期の実用化が期待できると考えている.
5 教歴・研究歴の流れにおける今回研究の位置づけ
研究代表者の菅原雄介は,ロボットシステム設計学の構築と展開をライフワークとしており,この中で「網状索道自走ロボット」と「構造可変型ハイブリッドワイヤ機構」は,まったく新たなロボットシステムの提案を行うという意味で大きな意味のあるものである.また,パラレルワイヤ機構を軌道上を自走する作業移動ロボットとして応用するコンセプトは特に,ドローンやSLAMなど最近急速に発展してきているフィールドロボティクスの分野に対するメカニズム研究者としての挑戦である.
共同研究者の遠藤央は,これまでの研究において持続可能性をキーワードとしたロボット技術の応用に取り組んでおり,湖沼や森林のモニタリング等への応用が可能である本研究はその流れに位置付けられる.またワイヤの特性に着目したパラレルワイヤ機構の研究や移動ロボットを用いたシステムの研究にも取り組んでおり,これらの基礎技術の応用研究として重要な意味を持つ.
共同研究者である石井裕之は,自然や生物と共生するロボット技術の開発に取り組んでおり,近年,森林における野生動植物の観察や保全のためのロボットの開発に特に注力している.本研究において開発を進める網状索道自走ロボットは,森林内での新たな移動技術として極めて有望であり,またこれまで開発してきた環境モニタリングロボットとの連携も期待され,ロボットを用いた森林モニタリングを加速する重要な研究と位置付けられる.
研究協力者の衣川潤は,これまでにパラレルワイヤ駆動装置のキャリブレーション手法および制御方法について研究しており,近年では福島県の豊かな森林を守るためのロボット技術開発への応用に取り組んでいる.本研究において開発を進める網状索道自走ロボットは,森林整備への活用に大きな期待が寄せられており,ロボット技術による自然環境保全のために重要な研究と位置付けられる.
6 本研究にかかわる知財・発表論文等
【論文】
| 1. | Yusuke Sugahara, Taishu Ueki, Daisuke Matsuura, Yukio Takeda and Minoru Yoshida, Offline Reference Trajectory Shaping for a Cable-Driven Earthquake Simulator Based on a Viscoelastic Cable Model, IEEE Robotics and Automation Letters, Vol. 7, No. 2, pp. 2415-2422, April 2022. |
| 2. | 加納弘嗣,菅原雄介,遠藤央,石井裕之,武田行生,空間に構造的に架設された網状の索道を自走するロボットの研究―ダブルアーム型の運動学,動作計画と機構の最適化について―,日本ロボット学会誌,Vol. 39,No. 8,pp. 767-770,2021年10月. |
【国際会議(査読付)】
| 3. | Kazuki Hayashi, Yusuke Sugahara, and Yukio Takeda, Experimental Study on Thrustered Cable-Suspended Parallel Robot for Collaborative Task, Proceeding of the 6th International Conference on Cable-Driven Parallel Robots (CableCon2023), Nantes, France, June 2023.(印刷中) |
| 4. | Andres Osorio Salazar, Yusuke Sugahara and Yukio Takeda, A Differential Mechanism to Enhance the Scalability of a SMA-Wire-Bundle Linear Actuator, The 6th IFToMM Asian Mechanisms and Machine Science Conference (AsianMMS2021), Hanoi, Vietnum, Dec. 2021. In: Khang N.V., Hoang N.Q., Ceccarelli M. (eds) Advances in Asian Mechanism and Machine Science. ASIAN MMS 2021. Mechanisms and Machine Science, vol 113. Springer, Cham. |
【国際会議予稿(査読なし)】
| 5. | Ryosuke Hakamata, Mitsuru Endo, Yusuke Sugahara, Yukio Takeda, and Hiroyuki Ishii, Dynamic modeling and parameter identification of an elastic rod for analyzing fly-fishing, Proceeings of the 5th Jc-IFToMM International Symposium, 京都府,2022年7月.(A Finalist for Young Investigator Fund Best Paper Award) |
【国内会議予稿】
| 6. | 秋元快成,衣川潤,遠藤央,菅原雄介,網状索道自走ロボットのための副索始点構築を行う索道ケーブル結束装置の試作,日本機械学会ロボティクス・メカトロニクス講演会2023,愛知県,2023年.(印刷中) |
| 7. | 袴田遼典,遠藤央,菅原雄介,フライフィッシングの原理を応用した小型低出力マニピュレータによる投擲の研究(非線形制御を用いたマニピュレータ関節軌道の生成),日本機械学会ロボティクス・メカトロニクス講演会2023,愛知県,2023年.(印刷中) |
| 8. | 一條敦弘,馬場星明,袴田遼典,菅原雄介,遠藤央,石井裕之,干場功太郎,武田行生,網状の索道を自走するロボットの研究(ケーブル変形を考慮した網状索道架設計画法の開発),第23回計測自動制御学会システムインテグレーション部門講演会(SI2022),pp. 532-537,千葉県,2022年12月. |
| 9. | 松広航, 岩淵巧実, 住田和也, 永井涼太, Nu NuWin, 菅原雄介, 春山純一, 石井裕之, 高西淳夫. 雫型偏心車輪を用いた月面縦穴探査ロボットにおける強化学習による走行動作の獲得, 第66回宇宙科学技術連合講演会, 4A03, Nov. 2022. |
| 10. | 松広航,野田慶太,永井涼太,Nu NuWin,春山純一,菅原雄介,石井裕之,高西淳夫,月面縦孔の探査を行う小型ロボットの開発~非接地吊り下げ状態におけるウィンチを用いた振子運動の制御~,第40回日本ロボット学会学術講演会,3J2-03,東京都,2022年9月. |
| 11. | 呉嘉博,石橋啓太郎,菅原雄介,石井裕之,粘着樹脂と爪を用いた壁面取り付きロボットの開発―柔らかい素材と硬い素材を組み合わせた爪パーツの試作・評価―,日本機械学会ロボティクス・メカトロニクス講演会2022,2P1-M04,北海道,2022年6月. |
| 12. | 馬場星明,菅原雄介,遠藤央,石井裕之,武田行生,複数のテザーの投擲・巻取りとこれらへの懸垂により移動するロボットの開発(第1報,コンセプトの提案と基本機能の実験的検討),第22回計測自動制御学会システムインテグレーション部門講演会(SI2021),pp. 607-612,オンライン,2021年12月. |
| 13. | 松広航,鈴木滋英,永井涼太,野田慶太,Nu NuWin,菅原雄介,春山純一,高西淳夫,石井裕之,壁面跳躍により月面縦孔の探査を行う小型ロボットに関する研究,第65回宇宙科学技術連合講演会,3K17,2021年11月. |
| 14. | 永井涼太,松広航,NuNuwin,鈴木滋英,野田慶太,菅原雄介,春山純一,高西淳夫,石井裕之,ウィンチと偏心車輪を用いて月縦孔壁面の探査を行う小型ロボットの耐衝撃性の向上に関する研究,第39回日本ロボット学会学術講演会,1D1-01,2021年9月. |
| 15. | 袴田遼典,遠藤央,菅原雄介,石井裕之,武田行生,フライフィッシングの原理を応用した小型低出力マニピュレータによる投擲の研究(第1報,ロッドからの繰り出しを考慮したラインのモデリング),日本機械学会ロボティクス・メカトロニクス講演会2021,2P3-H15,2021年6月. |
【招待講演など】
| 16. | 菅原雄介,ドローンに代わる新しい空間移動ロボット「網状索道自走ロボット」の開発について,大田区産業振興協会第108回東京工業大学技術セミナー,東京都,2023年3月. |
| 17. | 菅原雄介,網状索道自走ロボット,福島大学講演会「福島県の豊かな森林を持続可能なものとするためのロボット技術」,福島県,2023年3月. |
| 18. | 遠藤央,福島県の豊かな森林を持続可能なものとするためのロボット技術,福島大学講演会「福島県の豊かな森林を持続可能なものとするためのロボット技術」,福島県,2023年3月. |
| 19. | 石井裕之,ロボティクスを活用した自然・動物・人の共生,福島大学講演会「福島県の豊かな森林を持続可能なものとするためのロボット技術」,福島県,2023年3月. |
| 20. | 菅原雄介,網状索道自走ロボット,日本機械学会2022年度年次大会機素潤滑設計部門企画先端技術フォーラム「ケーブル・ワイヤ駆動ロボットの基礎と実用化」,F113-03,富山県,2022年9月. |
7 補助事業に係る成果物
(1)補助事業により作成したもの
無し
(2)(1)以外で当事業において作成したもの
前述の発表論文等
8 事業内容についての問い合わせ先
所属機関名:東京工業大学
(トウキョウコウギョウダイガク)
住 所:〒152-8552
東京都目黒区大岡山2-12-1(i6-15)
申 請 者:准教授 菅原雄介(スガハラユウスケ)
担当部署: 工学院 機械系 機能システム学分野
(コウガクイン キカイケイ キノウシステムガクブンヤ)
E-mail: info[於]msd.mech.e.titech.ac.jp ([於]→@)
URL: http://www.msd.mech.e.titech.ac.jp/jp/