※本ページでは,公益財団法人JKA2019年度研究補助「網状索道自走式構造可変パラレルロボットの実用技術開発」の概要広報資料を掲載しています.
1 研究の概要
本研究補助事業では,平成29・30年度研究補助で提案した,網状に相互接続することで空間的に架設されたケーブルを自走する複数のロボットから繰り出したケーブルにより手先効果器を駆動する構造可変型シリアル・パラレルハイブリッドワイヤロボットについて,この内容を発展・拡大し,網状索道自走機の機構と制御法,索道架設・経路計画法,自走機による物資運搬技術・環境モニタリング技術,パラレル機構による作業技術などの研究開発を行うことで,自然環境や災害現場等における作業,物資運搬,調査等に有用な,信頼性の高いフィールドロボットシステムとしての実用技術を開発するための研究を行った.
2 研究の目的と背景
研究代表者らは,平成29年度研究補助事業(複数年)において,網状索道自走機構と構造可変型パラレルワイヤ機構によるフィールドロボットを提案した.これは,クモの巣のように相互接続することで空間的・曲線的に架設されたケーブル(網状索道と呼ぶ)を軌道として利用し空間内を自走するロボットと,これを複数用いさらにここから繰り出した複数のケーブルにより手先効果器を駆動する構造可変型直列・並列ハイブリッドパラレルワイヤロボットである.同事業ではこの基本的アイデアを提案し,網状索道走行機構の原理検証モデルや索道架設手法を開発し,さらにこれを用いたパラレルワイヤ機構についての研究を進めてきた.
本研究は,この内容をさらに発展・拡大し,フィールドロボットとしての実用技術を開発するものである.具体的には網状索道自走機の機構と制御法の開発,索道架設・経路計画法の研究,物資運搬技術の開発,環境モニタリング技術の開発,パラレル機構による作業技術の開発などにより,自然環境や災害現場等における作業,見回り,物資運搬,調査,救助に有用な,信頼性の高く高速・高出力な作業移動ロボットである新たなフィールドロボットシステムの実用技術を開発することを目的とした.
3 研究内容
本研究の計画は複数の研究項目に分かれており,各項目の実施内容について以下に示す.
① 網状索道自走機の機構と制御法の開発
網状索道を軌道として利用するには,ケーブルの接続点(分岐点)を通過しながら自走する能力が必要となる.例えば二股に分かれた分岐点を通過するには,行く先の2本の索道のどちらかを選択して乗り移ることができなければならない.本研究開始までにケーブル上の走行,分岐点における枝の選択の分岐点の通過を実現しているが,ハードウェアは最適化されておらず,また制御法はマニュアル制御であり,自動化には運動学と動作計画法の開発が必要であった.
そこで,分岐点を越えて自走できる移動ロボットについて,現状の試作機を改良し,より小型・軽量で信頼性の高い機構と基本的な機体の姿勢制御法を開発した.
まず,Remote Center Mechanism(RCM,ビデオ1)の運動学関係の定式化を行った.つぎにこれをベースとして,Double arm type自走機の運動学関係の定式化を行った.このモデルに基づき,6つの能動関節の角変位とエンドエフェクタにあたる駆動部の姿勢関係の定式化を行った.この結果を用いることで,進行する副索の方向を与えれば,その方向に走行するための各関節の動作パターンを求めることができる.これをもとに,動作計画手法の開発と機構の最適化手法を開発した.
ここではケーブルの分岐点をモデル化し,またDouble arm type自走機が前後に有する3Rシリアル球面機構の運動学関係を求めた.特にこの機構はケーブル軸周りのモーメントを発生できないため,ケーブルモデルに対する前後の駆動部の姿勢を与えてもこの姿勢が実現できるとは限らず,与えられた二つの駆動部の姿勢を実現する際にロボットがケーブルに対しとりうる姿勢の算出に,静力学的なつり合いを考慮した運動学的逆問題(Kineto-static inverse problem)を解く計算手法を開発した.次にこれを用い,分岐点を持つケーブルを通過するための動作計画法を開発した.分岐点通過のために必要な駆動部の姿勢の遷移を算出し,これをクォータニオンを用いて球面線形補間することで目標関節角を生成するものである.さらにこの動作計画法を利用し,分岐点走行の際の一連の動作においてケーブルとの干渉が起こらずまた特異点の問題を生じないよう機構定数の最適化を行った.以上により開発した試作機TCC80Dのケーブル分岐点通過の様子をビデオ2~6に示す.
② 索道架設・経路計画法の研究
網状索道は相互に接続されることで空間内に折れ線的に架設されるため,ある索道(主索)の目標形状を実現するための他の索(副索)の配置は力学的に導出することができる.またこの際,ロボット本体やケーブルが環境に干渉しない索道のパスを求める必要がある.
そこで行いたい作業のモデルと環境モデルをもとに,ロボット本体やケーブルが環境に干渉しないケーブル配置手法の開発を行った.具体的にはRRT*とボロノイ図に基づく索道経路計画法の研究,力学的つり合いを考慮した副索計画法の開発を行った.
【RRT*に基づく索道経路計画法】
自走機が障害物との干渉なく全区間自力で走行可能となることを条件とした,スタート地点からゴール地点付近までの主索経路を複数生成し,その中から総距離が最短の経路を導出するアルゴリズムを作成した.
手法はRRT*をベースに,自走機の大きさを考慮した障害物との干渉判定と自走機の走行可能最大傾斜角・最大旋回角を考慮したエッジの判定を行なうことで,自走機が障害物との干渉なく自力で全区間走行可能となるスタート地点からゴール地点までの経路を複数生成し,その中から最短経路を導出するものである.
【ボロノイ図に基づく索道経路計画法】
従来,2次元平面を対象とし,模擬環境において検討していたものを実環境への適用を想定し拡張した.まず,カメラやLiDAR等を用いて計測した実環境の障害物等を三次元ポイントクラウドデータとして得る.これをボクセルデータとして変換し,利用する(図1).このボクセルデータにロボットとの接触を考慮したものに基づき三次元ボロノイ図を生成し,ボロノイ線およびボロノイ点から索道および経路を作る.
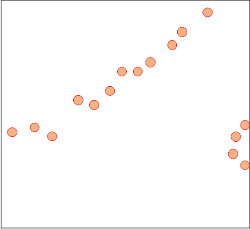
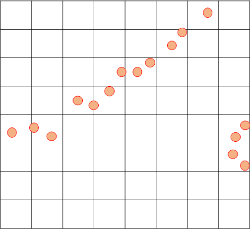
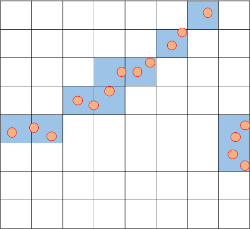
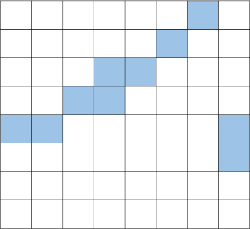
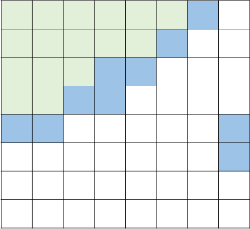
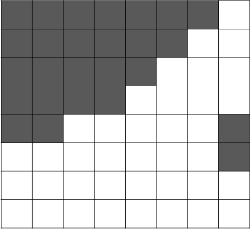
図1. 環境の計測情報に基づく障害物の位置の抽出手法
【力学的つり合いを考慮した副索計画法】
3次元空間内での副索道の生成手法について研究した.結節点の空間における位置の3自由度を拘束するためには4本以上のワイヤが必要である.結節点に索道を構成する2本のワイヤに加え,副索道を形成するワイヤは2本以上必要である.本研究では副索道を2本とし,1本目は結節点における保持力を最大化するよう,2本目は索道および副索道への張力が均等に分配されるように方向を決定する.これを自動的に計算可能なアルゴリズムとして実装した.生成した適用例を図2に示す.
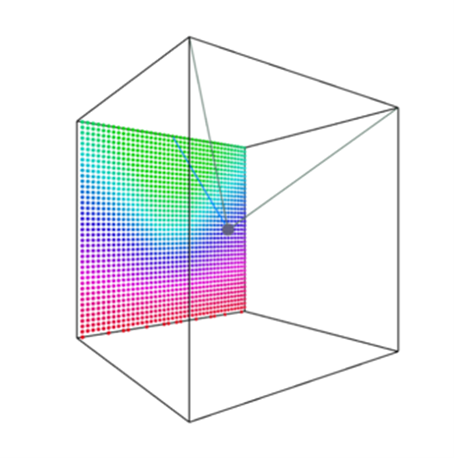
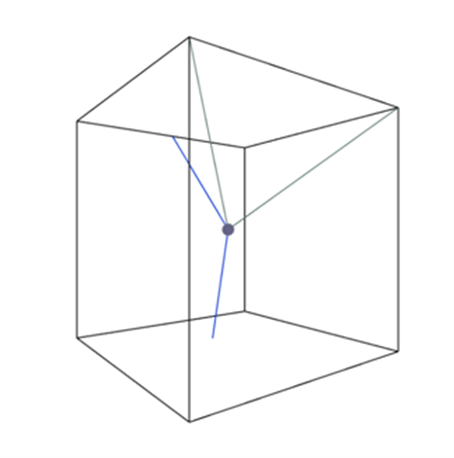
図2. 副索道の生成
【索道架設法の研究(投擲ロボットの研究)】
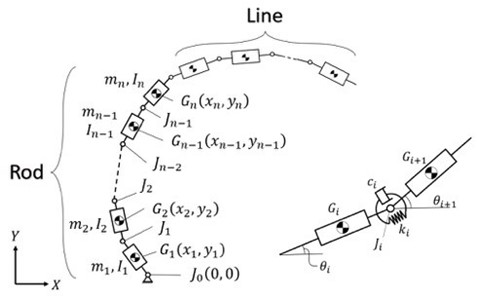
ロボット自体が索道および副索道を架設できる手法を考案し,そのためのケーブルのモデルを構築した.図3に本研究で用いる架設方法を示す.物体を投擲するのではなく,ロボットに搭載する柔軟な構造物によりケーブル自体を投擲する.架設したい既存の索道や物体(木枝など)にケーブルを掛け,ケーブルを手繰りよせることで先端の鉤状の構造物を固定する.このケーブルの投擲を実現するために図4に示す剛体多リンクモデルとして投擲機構およびケーブルをモデル化し,基礎実験よりモデルの妥当性を確認した.
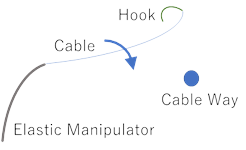
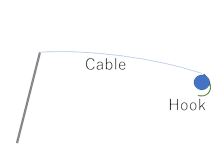
図3. ワイヤの投擲による索道および副索道の架設
③ 物資運搬・環境モニタリング技術の開発
網状索道自走機と連携して物資運搬,環境モニタリングを行う小型ロボットの開発に取り組んだ.
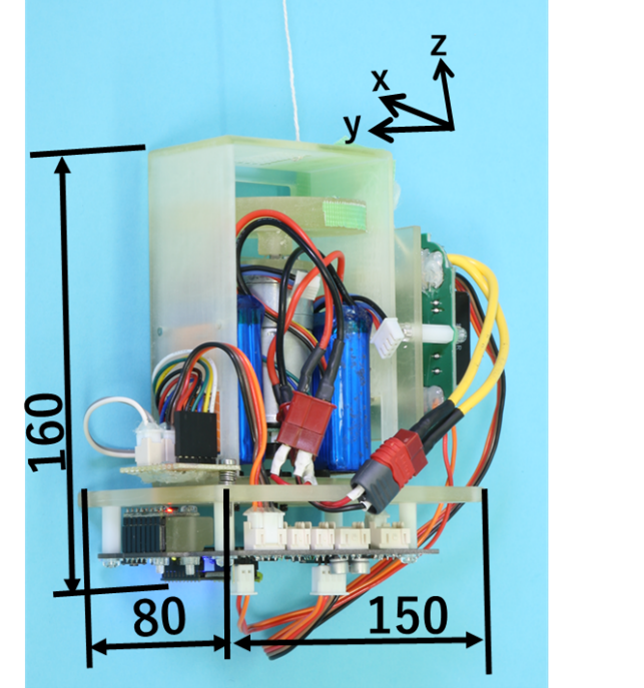
このロボットは,林床を覆う笹や低木を回避するために地表から一定以上の高さに架設された網状索道上の自走機から地表まで,網状索道自走機から巻き取り機構を備えたテザーによって降下することで,地表付近の観察や地表への小動物用トラップやセンサの敷設をおこなう.本研究では,降下中に樹枝や岩などの障害物を回避するための能動フリッパーならびに,それらを駆動した際に生じるテザーまわりの回転を抑制するためのフライホイール,滑落によって地表や障害物に衝突した際の衝撃を緩和する機構,ならびにそれらの制御系についての要素技術の開発を行った.また各要素技術について試作機を開発した.例として能動フリッパを備えた試作機をビデオ7に,テザーまわりの回転を抑制するためのフライホイールを備えた試作機を図5に示す.この機体には,電源,制御回路,無線通信機が搭載されており,遠隔操作によって自律的に動作することが可能となっている.
開発した各試作機について,実験によって森林での使用に耐えうる性能を有していることを確認した.
④ ハイブリッドワイヤロボットによる作業技術の開発
本研究で提案する,可動範囲を変形できる構造可変型直列・並列ハイブリッドワイヤ機構の実施例として,開発した網状索道自走機を2台用いた3自由度機構を試作した.
開発した構造可変型直列・並列ハイブリッドワイヤ機構の動作実験の様子をビデオ8に示す.空間的に架設した網状索道上を走行する2台のDouble arm型網状索道自走機TCC80Dにそれぞれウインチを取り付け,これらより繰り出す2本のワイヤを用いてエンドエフェクタの位置決めを行うシステムである.
この実験では,障害物を取り囲むように網状索道が架設されている,このような環境においては,通常の懸垂型パラレルワイヤ機構ではワイヤと障害物の干渉のために障害物の周囲にエンドエフェクタを位置決めすることは困難であるが,提案したシステムは障害物を避けるように自走機が移動することで障害物とワイヤが干渉しない懸垂型パラレルワイヤ機構を構成することができている.
4 本研究が実社会にどう活かされるかー展望
本研究の成果は,中長期的には,山林内や災害現場等の非整備環境における継続的な物資運搬や見回りなどに有用な,高効率・高速で信頼性の高い移動ロボットの実現,また障害物の多い自然環境や災害現場等における調査や救助,作業に有用な,高出力な作業移動ロボットの実現というイノベーションとなる.これらの技術は災害対応ロボットや廃炉作業ロボット,除染作業ロボット,自然環境モニタリングロボット,農林業用ロボットに応用可能であり,これらのロボットシステムの実用化のために本研究の成果は不可欠である.
さらに,本研究の成果を踏まえ,テーマをさらに拡張し新たな共同研究者の参画も含めた研究計画で2021-2022年度の公益財団法人JKA研究補助に応募し,交付決定を頂いている.これは本研究の成果をベースに,網状索道自走ロボットに加えて,ケーブルの投擲により環境に索道を架設する投擲ロボット,ケーブルをけん引しながら投擲される被投擲ロボットより構成され,これらにより非整備環境における網状索道の自動構築とこの上の自走,ここからの降下による索道下への位置決め等を行うことができるフィールドロボットシステムであり,更なる成果が期待できる.
また本研究の成果に興味を持っている企業もあり,早期の実用化も期待できると考えている.
5 教歴・研究歴の流れにおける今回研究の位置づけ
研究代表者の菅原雄介は,ロボットシステム設計学の構築と展開をライフワークとしており,この中で「網状索道自走ロボット」と「構造可変型ハイブリッドワイヤ機構」は,まったく新たなロボットシステムの提案を行うという意味で大きな意味のあるものである.また,パラレルワイヤ機構を軌道上を自走する作業移動ロボットとして応用するコンセプトは特に,ドローンやSLAMなど最近急速に発展してきているフィールドロボティクスの分野に対するメカニズム研究者としての挑戦である.
共同研究者の遠藤央は,これまでの研究において持続可能性をキーワードとしたロボット技術の応用に取り組んでおり,湖沼や森林のモニタリング等への応用が可能である本研究はその流れに位置付けられる.またワイヤの特性に着目したパラレルワイヤ機構の研究や移動ロボットを用いたシステムの研究にも取り組んでおり,これらの基礎技術の応用研究として重要な意味を持つ.
共同研究者である石井裕之は,自然や生物と共生するロボット技術の開発に取り組んでおり,近年,森林における野生動植物の観察や保全のためのロボットの開発に特に注力している.本研究において開発を進める網状索道自走ロボットは,森林内での新たな移動技術として極めて有望であり,またこれまで開発してきた環境モニタリングロボットとの連携も期待され,ロボットを用いた森林モニタリングを加速する重要な研究と位置付けられる.
6 本研究にかかわる知財・発表論文等
【論文・国際会議(査読付)】
| 1. | 加納弘嗣,菅原雄介,遠藤央,石井裕之,武田行生,空間に構造的に架設された網状の索道を自走するロボットの研究(ダブルアーム型の運動学,動作計画と機構の最適化について),日本ロボット学会誌,巻号未定,ページ未定,2021.(採録決定済,印刷中) |
| 2. | Andres Osorio Salazar, Yusuke Sugahara, Daisuke Matsuura, Yukio Takeda, Scalable Output Linear Actuators, a Novel Design Concept Using Shape Memory Alloy Wires Driven by Fluid Temperature, Machines, Vol. 9, Issue 1, 14, 2021. |
| 3. | Yusuke Sugahara, Guangcan Chen, Nanato Atsumi, Daisuke Matsuura, Yukio Takeda, Ryo Mizutani and Ryuta Katamura, A Suspended Cable-Driven Parallel Robot for Human-Cooperative Object Transportation, In: Venture G., Solis J., Takeda Y., Konno A. (eds), ROMANSY 23 – The 23rd CISM-IFToMM Symposium on Robot Design, Dynamics and Control (ROMANSY2020), pp. 109-117, Springer, Cham, 2020. |
| 4. | Andres Osorio Salazar, Yusuke Sugahara, Daisuke Matsuura, and Yukio Takeda, A Novel, Scalable Shape Memory Alloy Actuator Controlled by Fluid Temperature, In: Niola V., Gasparetto A. (eds), Advances in Italian Mechanism Science, The 3rd International Conference of IFToMM ITALY, pp. 617-625, Springer, Cham, 2020. |
【国内会議予稿】
| 5. | 袴田遼典,遠藤央,菅原雄介,石井裕之,武田行生,フライフィッシングの原理を応用した小型低出力マニピュレータによる投擲の研究(第1報:ロッドからの繰り出しを考慮したラインのモデリング),日本機械学会ロボティクスメカトロニクス講演会(ROBOMECH2021),2P3-H15,2021.(印刷中) |
| 6. | 加納弘嗣,菅原雄介,遠藤央,石井裕之,武田行生,空間に構造的に架設された網状の索道を自走するロボットの研究(ダブルアーム型の運動学,動作計画と機構の最適化について),第38回日本ロボット学会学術講演会講演予稿集,3C1-04,2020. |
| 7. | 野田慶太,松広航,Nu Nuwin,鈴木滋英,春山純一,菅原雄介,高西淳夫,石井裕之,姿勢制御を行い縦孔壁面の探査を行う小型ロボットの製作,第38回日本ロボット学会学術講演会,2F1-07,2020. |
| 8. | 遠藤央,市川大也,菅原雄介,石井裕之,網状索道自走式構造可変パラレルロボット―網状索道の生成手法―,第37回日本ロボット学会学術講演会,1H1-05,2019. |
【招待講演など】
| 9. | 菅原雄介,差動機構を用いたロボットの駆動について,日本機械学会研究協力事業委員会RC283「歯車装置の設計・製造・評価に関する革新技術のための試験・調査研究分科会」第3回全体分科会「モーションコントロールを支える要素技術の最新動向~歯車とそのライバル達~」,神奈川県,2020年1月. |
7 補助事業に係る成果物
(1)補助事業により作成したもの
無し
(2)(1)以外で当事業において作成したもの
前述の発表論文等
8 事業内容についての問い合わせ先
所属機関名:東京工業大学
(トウキョウコウギョウダイガク)
住 所:〒152-8552
東京都目黒区大岡山2-12-1(i6-15)
申 請 者:准教授 菅原雄介(スガハラユウスケ)
担当部署: 工学院 機械系 機能システム学分野
(コウガクイン キカイケイ キノウシステムガクブンヤ)
E-mail: info[於]msd.mech.e.titech.ac.jp ([於]→@)
URL: http://www.msd.mech.e.titech.ac.jp/