Latest News and Announcements
-
Announcement of Three Doctoral Dissertation Defenses
Doctoral Dissertation Defense by Mr. Takamaru Saito Dissertation Title:足関節背屈可動域制限者のための独立リンク型歩行支援装置の研究 Chair:Prof. Yukio Takeda Date:Thursday, January 15, 2026 Time:10:00–12:00 Venue:Room 322, Ishikawadai Building No. 6Ookayama Campus Contact:takeda.y.2c40[at]m.isct.ac.jp Doctoral Dissertation Defense by Mr. Ryousuke Hakamada Dissertation Title:Study on dynamics and control of false casting towards an engineering interpretation of fly-casting(フライキャスティングの工学的理解のためのフォルスキャストの力学と制御の研究) Chair:Prof. Yusuke Sugahara Date:Monday, January 19, 2026 Time:16:00–18:00…
-
Reiji Muramoto won the Best Young Presentation Fellow Award of the Japan Society of Mechanical Engineers at ROBOMECH 2025.
At the Robotics and Mechatronics Conference 2025 (ROBOMECH2025) held in June 2025, Mr. Reiji Muramoto received the Best Young Presentation Fellow Award from the Japan Society of Mechanical Engineers.
-
Yifan Feng Received the Student Paper Certificate of Merit at IFToMM Italy 2024
Yifan Feng won the Student Paper Certificate of Merit for his presentation titled “Conceptual Design of Hybrid Thrustered Cable-Suspended Parallel Robots” at the 5th International Conference of IFToMM Italy, held in September 2024 in Torino, Italy. Due to visa issues, he was unable to attend in person and presented online.
-
International Seminar of Japan IFToMM Conference will be held
Andres Osorio Salazar, a graduate of our laboratory, will be a speaker at the international seminar organized by IFToMM conference in Japan. The title is “From fundamental actuator research to impactful applications”. Date: Tuesday, May 27, 17:00-18:30Venue: Hybrid (Science Tokyo, Ookayama Campus, Ishikawadai I3-304 / Zoom)Registration: https://forms.gle/ntwN3pXiRp92ZikXAAdmission: Free For more information
-
Dr. Sugahara was promoted to Full Professor
Dr. Sugahara has been promoted to the position of full Professor on April 1st, 2025.
-

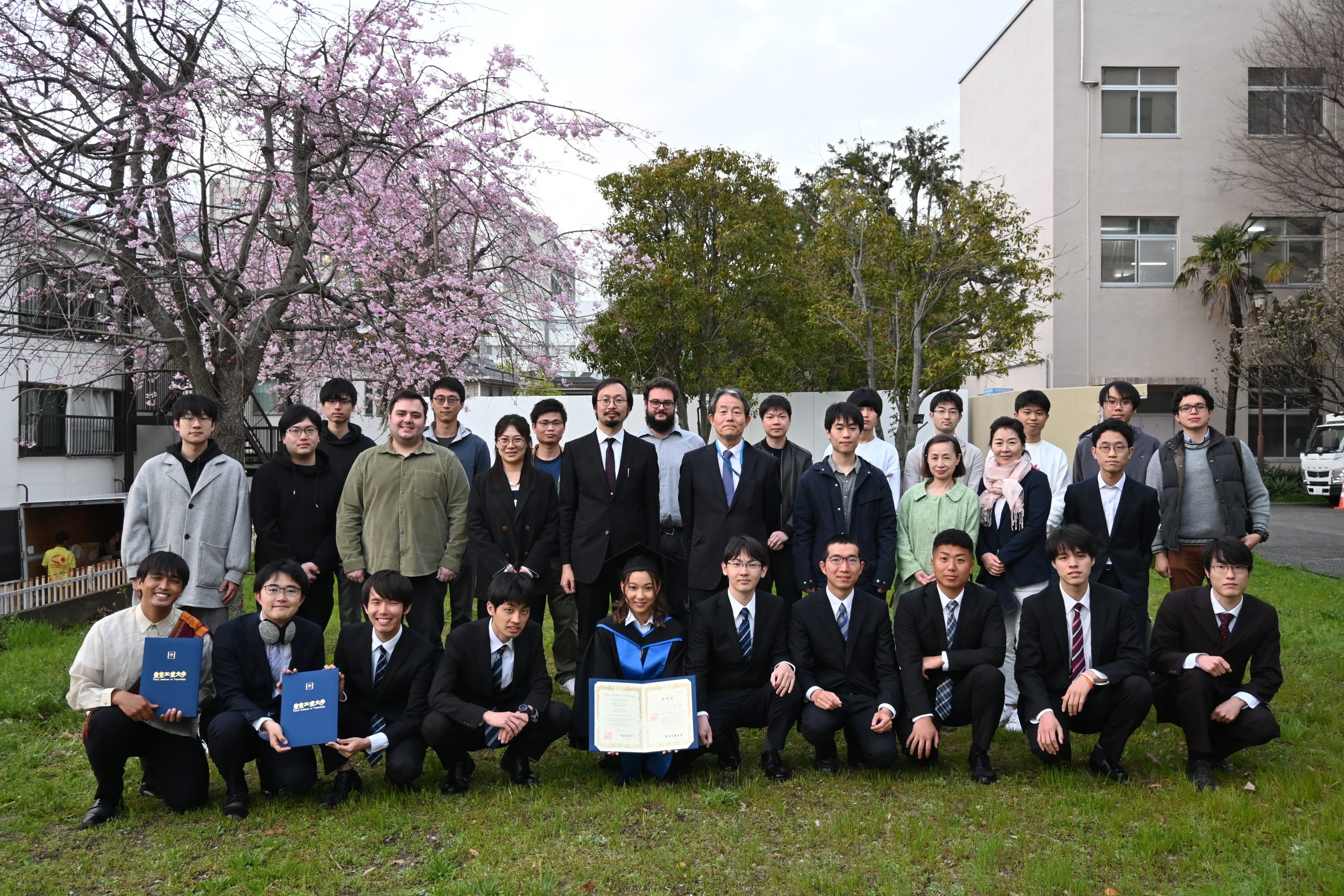
2024 Degree Conferment Ceremony – One student from our laboratory received an award
The Degree Conferment Ceremony was held on March 26, 2025. One doctoral student, six master’s students, and six undergraduate students from our laboratory completed their respective programs. On the same day, a student from our laboratory received the following award: JSME Hatayama Award
-

Y2024 Lab Alumni OB/OG Meeting (Kaname-kai) Was Held
On May 25, 2024, we held the Kaname-kai, an alumni OB/OG meeting of our laboratory. Although it was the first meeting since November 2019 due to COVID-19, it was a great success with a total of 79 participants. Heartfelt thanks to all participants for making the meeting a memorable and successful event!
-
Lab Tour Information for Graduate Entrance Exam Candidates
We will be holding a lab tour for those taking the graduate entrance examination in the 2024 academic year. If you wish to participate, please register using the link below.1st tour: Offline @ Ookayama Campus: March 27, 2024 (Wednesday) 15:30-17:002nd tour (Zoom, together with Tsutsui & Endo Lab)April 19, 2024 (Friday) 14:30~16:00(Takeda & Sugahara Lab)…
-
Lab Tour for New Undergraduate Fourth-Year Students in the 2024 Academic Year
We will be holding lab tours for the new undergraduate fourth-year students in the 2024 academic year. If you wish to participate, please register using the link below.1st tour (Offline @ Ookayama Campus): March 1, 2024 (Friday) 14:00-15:30 2nd tour (Offline @ Ookayama Campus): March 27, 2024 (Wednesday) 14:00-15:30 Additionally, after each tour, there will…
-

Our students on NHK program ‘Night of the Makaizo Society’
Some of you might be familiar with the NHK program ‘Night of the Makaizo Society’. It seems that our university team will be participating in it! Students from our lab will also appear on the program. The theme is ‘Toilet Floor Somersault.’ What could that be? Broadcast Date and TimeJanuary 25, 2024 (Thursday) 19:30 –…
-

Guests supported by Sakura Science Exchange Program
Researchers and students from Dalian University of Technology, led by Prof Tang Dawei and Prof. Li Mu have visited us during January 4th to 10th. The visit is supported by JST Sakura Science Exchange Program.
-
Spring Graduation Ceremony AY 2022・Three students from our laboratory won Awards
The Graduation Ceremony was held at our university on March 27, 2023, and 7 master’s students and 3 bachelor’s students graduated from our laboratory. On the same day, four students of our laboratory won the following awards. ・Mr. Hoshiaki BABA (M2) and Mr. Takamaru SAITO (M2) received the Best Presentation Award at the Presentation of…