Mission
Development of mechanical systems that support human and society based on mechanism design technology
1. Developmental research in mechanics: Focusing on design theory as well as the study, design, and development of novel mechanisms and machine components
2. Research on human-mechanical systems: Understanding human motion and mechanics to design systems that are ergonomic, safe, and effective in supporting human activities
3. Research on robot system design: Proposal and development of new mechanical, electronic, and robotic systems
4. Different industrial and societal realities brought about by the aforementioned technical advancements
Field of Study
Mechanical system design, robotics/mechatronics, mechanics, mechanical elements, welfare engineering, biomechanics
Research Details
A. Methodology / Concept Research
A1. Analysis, design, and optimization methods for mechanical motion systems and machine elements
- Kinematics/dynamics analysis of parallel mechanisms, evaluation of motion transferability, and mechanism synthesis
- Dynamic analysis of parallel robots considering joints gap
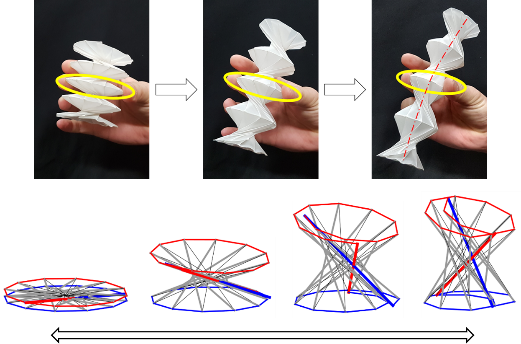
- Origami motion analysis model and characteristic analysis
- Calibration of cable-driven systems
A2. Kinematic and dynamic modeling, and design methods for human-machine systems
- Analysis and design methods for human-support device systems based on dynamic pairs
- Evaluation and design of devices (canes, handrails, etc.) that support the stable movement of elderly people
- Modeling, kinematics analysis, and design of rehabilitation and motion support equipment by considering the wearable characteristics on human body.
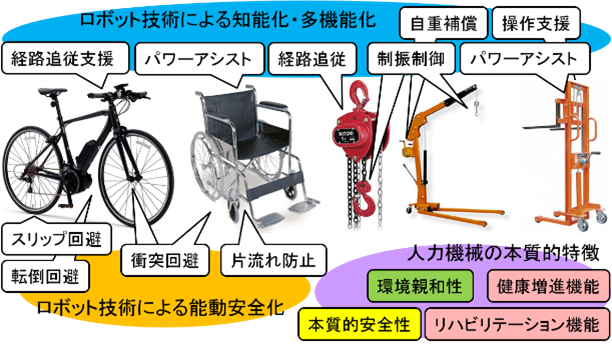
A3. PROPOSING NEW HUMAN-MACHINE INTERFACE SYSTEMS, DESIGN AND CONTROL OF SUCH MECHANISMS
“Powered by human, controlled by computer” – Research on human-machine systems that achieve both safe, comfortable, and sustainable human movement and the automation and robotization of physical tasks.

B. Applied Research
B1. Development of robots utilizing parallel and cable driven mechanisms
- Seismic motion simulator using a parallel cable drive mechanism (Ongoing)
- A reticulated self-propelled cable-driven robot with a variable structure parallel cable mechanism
A “reticulated cableway” consists of cables that are interconnected in a spider web shape. This research focuses on a variable structure, parallel cable mechanism that allows the cable delivery point to be moved spatially, where it can host multiple robots that run on the cable network.
B2. Development of Welfare Equipment
- Lower limb operated personal mobility systems for the elderly (2017 – ongoing)
- Upper and lower body rehabilitation systems
- Walking support and fall prevention systems
- Wearable lifting support systems
B3. Development of High-Performance Mechanical EleMents (Actuators, Power Transmission Systems, Power Reservoirs, Brakes, Bearings and etc.)
- Development of actuators for assistive devices e.g. A redundant hybrid actuator based on Assist-As-Needed concept
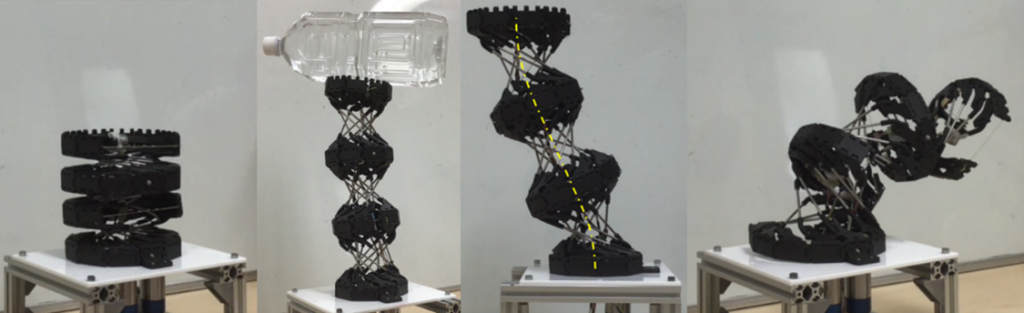
- Elastic/Active-Elastic joints with double helix structures (~2018)
- Power assist drive systems
- Other drive systems
B4. Continuum Robot
- Cable-driven continuum robot
- Elastic rod-driven continuum robot
- Continuum extendable arm capable of force work in narrow spaces
- Multi-degree-of-freedom rigid extendable arm inspired by origami
- Other deployment/adaptation mechanisms
B5. Development of Mechatronics Systems
- Research on the airframe design of the aerodynamic floating railway “Aerotrain”
- Non-contact manipulation system based on 3D magnetic tether
- Dynamics and design of AMT mechanism

Past Research
A. Development of robot mechanisms, their elements, and control systems
Comprehensive design and design of high-output, high-precision pipe benders using kinematics analysis, mechanical analysis, and singularity analysis methods of parallel mechanisms; on-machine calibration methods using image measurements, and development of pipe gripping and feeding devices; Development of elastic joints that can be used in extreme environments (vacuum, dust, high/low temperature, etc.)

B. Analysis of the motion characteristics of human bodies and development of welfare machines
Crutches-shaped walking support machines that can safely assist people with lower limb disabilities and the elderly in daily life while maintaining an upright posture; Rehabilitation devices that do not place excessive load on joints, etc.

C. Development of redundant and variable stiffness robot mechanism
Design and application of elastic redundant mechanisms that combine redundant mechanisms with passive elastic elements such as springs; Development of a variable stiffness mechanism that can be used as a manipulator or leg and can simultaneously control output position and stiffness.