- Technology that supports mobility in daily life environments for people with lower limb disabilities and the elderly
- Gripping motion support hand
- Mechanism of generating walking motion against clothing resistance
- Laser pointer with excellent operability
- rehabilitation equipment
1.Technology that supports mobility in daily life environments for people with lower limb disabilities and the elderly
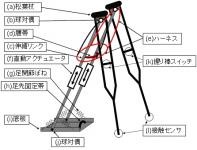
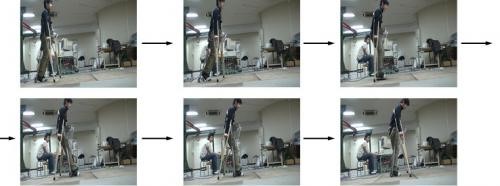
(1) Mechanism and control of crutch-type walking support device
We are developing a walking support machine for people with lower limb paraplegia and hemiplegia so that people with lower limb disabilities can walk while maintaining an upright posture. By using this device, we have confirmed through experiments that it is possible not only to walk continuously but also to climb over and descend steps. ), etc., and has been well received.


Literature:
- Shuta Sato, Yukio Takeda, Masaru Higuchi: Development of a crutch-shaped walking support machine, Proceedings of the 2008 Annual Conference of the Japan Society of Mechanical Engineers (7) [August 3-7, 2008, Yokohama City], 2008, pp.207-208 .
- Masaru HIGUCHI, Makoto OGATA, Shuta SATO, and Yukio TAKEDA, Development of a walking assist machine using crutches (Composition and basic experiments), Journal of Mechanical Science and Technology 24 (2010), pp. 245-248.
- Tatsuro Iwaya, Yukio Takeda, Makoto Ogata, Masaru Higuchi, Development of a Walking Assist Machine Using Crutches – Motion for Ascending and Descending Steps, New Trends in Mechanism Science – Analysis and Design, Mechanism and Machine Science 5, Springer, 2010, pp. 319-326.
(2) Design of supports that support movement
We are developing a motion analysis and design method that allows us to obtain an optimal cane tip shape that reduces the load on the human body during movement, considering the support object such as a cane that does not use an actuator and the human body as one movement system. Masu.
Literature:
- Soichiro Matsuda, Yukio Takeda: Shape design of supports for stable walking of elderly people: 1st report, Evaluation of balance return characteristics by supports, Japan Society of Mechanical Engineers [No. 10-53] Symposium: Sports and Human Dynamics 2010 Lecture Collection pp. 248-253
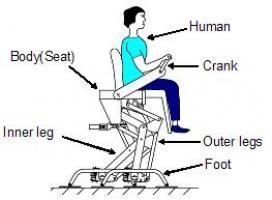
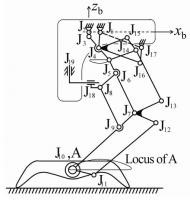
(3) Walking chair
We have developed a mechanism for a mobility support device that can be used as an alternative to a wheelchair and can also be used to climb over steps.
(3-1) Walking chair drive system


Specifications:
Mass: 88 kg (prototype III), 37 kg (prototype IV)
Size: 760 (W) x 925 (H) mm
Drive source: 1 for normal walking, 4 for responding to steps etc. ..
Features: A lightweight brake (see below) is used to cope with minute differences, and no special control is required.
Literature:
- Ichiro Kawabuchi, Yukio Takeda, Hiroaki Funahashi: Research on the ground adaptation mechanism of walking machines based on early/delay information of the landing time of the free leg foot (first report, proposal of an adaptive algorithm and configuration of the leg mechanism), Nippon Kikai. Proceedings of academic conferences C, 65-630 (1999-2), pp.850-855.
- Hiroaki FUNABASH, Yukio TAKEDA, Ichiro KAWABUCHI and Masaru HIGUCHI : Development of a Walking Chair with a Self-Attitude-Adjusting Leg Mechanism for Stable Walking on Uneven Terrain, Proceedings of the Tenth World Congress on the Theory of Machines and Mechanisms, Oulu, Finland, June 20-24, 1999, pp.1164-1169.
- Masaru Higuchi, Yukio Takeda, Hiroaki Funahashi, Tomomi Matsushita: Research on the ground adaptation mechanism of a walking machine based on early/delay information of the landing time of the free leg foot (2nd report, Dynamic characteristics of a walking machine with a ground adaptation mechanism) ), Proceedings of the Japan Society of Mechanical Engineers, Volume 69, No. 679, 2003, pp.788-795.
- Masaru Higuchi, Hiroaki Funahashi, Yukio Takeda, Takahiro Yamada, Yoshinari Oki, Masashi Tsukada: Development of a walking chair (basic structure and basic research on power-assisted drive system), Proceedings of the Japan Society of Mechanical Engineers 2001 Annual Conference ( III) [2001.8.27-30, Fukui City], pp.259-260.
- Kazunori Shimizu, Tsutomu Murai, Yoshinari Oki, Hiroaki Funahashi, Yukio Takeda, Masaru Higuchi: Development of a walking chair (design and production of a lightweight prototype), Proceedings of the 2001 Annual Conference of the Japan Society of Mechanical Engineers (III) [2001.8. 27-30, Fukui City], pp.261-262.
- Yukio TAKEDA, Masaru HIGUCHI, Hiroaki FUNABASHI, Yoshinari OKI and Kazunori SHIMIZU, Development of a walking chair (Fundamental investigations for realizing a practical walking chair), Proc. 4th Int. Conf. on Climbing and Walking Robots (CLAWAR2001), Karlsruhe, Germany, 24-26 September 2001, pp.1037-1044.
- Yukio Takeda, Hiroaki Funabashi and Masaru Higuchi: Walking Chair as a Welfare Robot, JSME News, 12-2(2001), pp.4-5.
- Yukio Takeda and Masaru Higuchi, Research and development of walking chairs, Design Engineering, Vol. 42, No. 3, March 2007, pp. 126-134.
(3-2) Development of lightweight brakes
We have developed a new brake mechanism that is lightweight and can generate a large braking force for use in the above-mentioned walking chairs, etc.

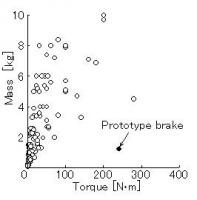
Specifications:
Maximum torque: 240Nm
Mass: 1.2kg
Drive method: Solenoid (coarse movement) + piezo actuator (fine movement)
Literature:
- Hiroaki Funahashi, Masaru Higuchi, Ichiro Kawabuchi, Yukio Takeda: Development of a brake for robots (first report, proposal for a brake using a combination of piezoelectric actuator and solenoid), Transactions of the Japan Society of Mechanical Engineers, Volume 68, Issue 673, 2002, pp.2730-2735.
- Masaru Higuchi, Hiroaki Funahashi, and Yukio Takeda: Development of brakes for robots (2nd report, characteristics of solenoid-driven wedge mechanism), Transactions of the Japan Society of Mechanical Engineers, Volume 68, No. 673, 2002, pp. 2736-2742.
- Masaru HIGUCHI, Hiroaki FUNABASHI and Yukio TAKEDA: Development of a Light-weight Brake driven by a PZT actuator for Robotic Application, Proceedings of 6th International Conference on Mechatronics Technology, September 29 – October 3, 2002, Kitakyushu Science Park, Kitakyushu, Fukuoka, Japan, pp.394-399.(Best paper awardを受賞)
- Masaru Higuchi, Yukio Takeda, Hiroaki Funahashi: Development of brakes for robots (3rd report, relationship between manufacturing/assembly errors and operating force), Transactions of the Japan Society of Mechanical Engineers C, Vol. 72, No. 723, 2006, pp. 3641- 3648.
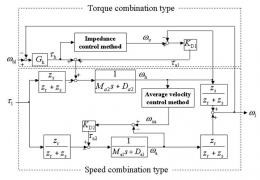
(3-3) Development of power assist drive system
For the walking chair mentioned above, we have developed a motion control method that assists the user with input using their arms.
Literature:
- Masaru Higuchi, Yukio Takeda, Hiroaki Funahashi, Takahiro Yamada, Takahiro Matsumoto: Development of a power-assist drive system for walking chairs (basic research on power-assist drive systems for steady walking), Transactions of the Japan Society of Mechanical Engineers, Volume C, Volume 69. , No. 683, 2003, pp.1885-1891.
- Yunfeng Wu, Masaru Higuchi, Yukio Takeda and Koichi Sugimoto, Development of a Power Assist System of a Walking Chair (Proposition of the Speed-Torque Combination Power Assist System), Journal of Robotics and Mechatronics, Vol.17, No.2, 2005, pp.189-197.
- Yunfeng WU, Hitoshi NAKAMURA, Yukio TAKEDA, Masaru HIGUCHI and Koichi SUGIMOTO, Development of a Power Assist System of a Walking Chair Based on Human Arm Characteristics, Journal of Advanced Mechanical Design, Systems, and Manufacturing, Vol. 1, No. 1, 2007, pp. 141-154.
2.Hand for supporting grasping motion
A prosthetic hand that replaces the grasping motion of users whose finger joints have a limited range of motion due to diseases such as rheumatism or tendon damage, so that they can independently grasp objects that are essential for daily life. We are developing. Specific development items include a method for estimating the desired grasping motion from the movement trajectory of the user’s fingers within a limited range of motion, a motion control method for generating the grasping motion of the prosthetic hand, and a force sense presentation function. We are developing a prosthetic hand mechanism.
3. Mechanism of generating walking motion against clothing resistance
Each joint in the human body has its own unique stiffness, and during daily movements, movement is generated unconsciously taking this into account. Therefore, if you wear clothing that significantly changes the stiffness of your joints, you will not be able to move as intended. In this research, we proposed an optimal joint stiffness design method that does not hinder the realization of intended movements using a spacesuit as an example.
Literature :
- Koji Kita, Yukio Takeda: Analysis of factors determining standing posture relative to spacesuit knee resistance, Japan Society of Mechanical Engineers [No. 10-53] Symposium: Sports and Human Dynamics 2010 Proceedings, 2010, pp. 122 -127.
4. Laser pointer with excellent operability
Human body movements include involuntary vibrations called tremors, which are triggered by psychological factors such as tension, and can interfere with the realization of intended movements. In our laboratory, we are developing a motion control system that uses a laser pointer as an example to measure motion, estimate intention, and control actuators to enable intended motion while suppressing the effects of tremor.
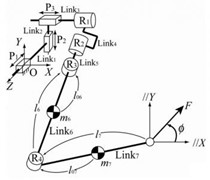
We are developing a device that contributes to the rehabilitation of people whose joint range of motion is narrower than that of healthy people due to tendon damage. We are conducting research with the aim of developing a device that is easy to use and requires less input, while also being able to adjust the load according to the rehabilitation situation while being compatible with the complex structure of human joints.
Literature :
- Tatsuya Koga, Yunho Tsoi, Yukio Takeda, Development of rehabilitation device using parallel mechanism (configuration of control system), Proceedings of the Japan Society of Mechanical Engineers Robotics and Mechatronics Conference 2010, 1A2-G23.
- Tatsuya KOGA, Yun Ho TSOI and Yukio TAKEDA, “Development of a joint rehabilitation ROBOT using parallel mechanism -Composition of the control system-”, Proc. the First IFToMM Asian Conference on Mechanism and Machine Science, October 21 – 25, 2010, Taipei, Taiwan (CD-ROM proc).