(1) Cable-driven continuum robot
Literature
- Daisuke Matsuura, Ryota Shioya, H. Harry Asada and Yukio Takeda, An Extendable Continuum Robot Arm Using a Flexible Screw as a Backbone to Propel Inside a Confined Space with Discontinuous Contact Area, Proc IMechE Part C: J Mechanical Engineering Science, 2022, Vol. 0(0) 1 -12, DOI: 10.1177/09544062221080009
- Kota Shioya, Daisuke Matsuura, Yusuke Sugawara, Yukio Takeda. Development of a wire-driven continuum robot with a wide working area (mechanism design of a one-segment continuum robot focusing on the working area of attitude angle), Proceedings of the Japan Society of Mechanical Engineers. , Vol. 88, No. 915, p. 22-00205, Oct. 2022.
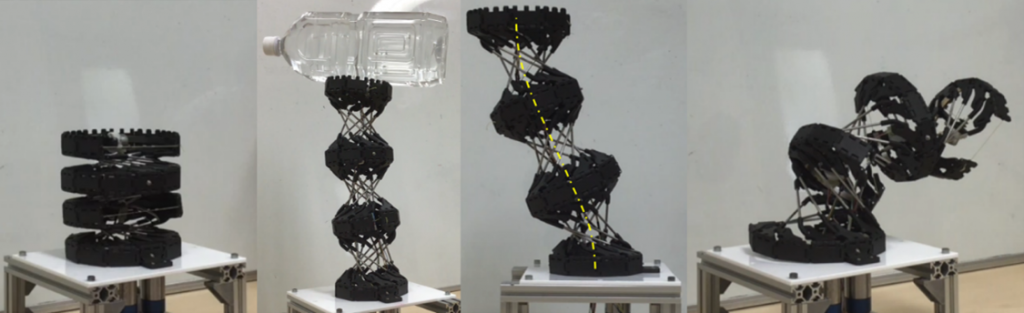
(2) Elastic rod-driven continuum robot
Literature
- Lei, Y., Sugahara, Y., Takeda, Y. (2022). Design and Inverse Kinematics of a Novel Tendon-Driven Continuum Manipulator Capable of Twisting Motion. In: Altuzarra, O., Kecskeméthy, A. (eds) Advances in Robot Kinematics 2022. ARK 2022. Springer Proceedings in Advanced Robotics, vol 24. Springer, Cham. https://doi.org/10.1007/978-3-031-08140-8_25
- Yuhang Lei, Ming Jiang, Yusuke Sugahara, and Yukio Takeda. (2023). Three-Actuated-DOF Parallel Continuum Robot with High Twisting Performance: Cosserat Rod-Based Kineto-Static Modeling and Simulation. In: Okada, M. (eds) Advances in Mechanism and Machine Science. IFToMM WC 2023. Mechanisms and Machine Science, vol 147. Springer, Cham. https://doi.org/10.1007/978-3-031-45705-0_62
(3) Continuum extension arm capable of force work in narrow spaces Multi-degree-of-freedom rigid extension arm inspired by origami
(4) Other deployment/adaptation mechanisms