ミッション
機構設計技術を基盤とした人と社会を支える機械システムの開発
1. 機構学の発展研究:新しい機構,機械要素の解析・設計・開発,設計論の構築
2. 人間機械系の研究:機械と関わる人間の運動・力学・感性の理解と設計開発への適用
3. ロボットシステム設計学の研究:新しいロボット/メカトロ機器/機械システムの提案・開発
4. 上記技術開発による,産業・社会における諸実問題の解決
研究分野
機械システム設計,ロボティクス・メカトロニクス,機構学,機械要素,福祉工学,生体運動力学
研究内容
A. 手法・コンセプト研究
(1) パラレルメカニズムの運動学・動力学解析,運動伝達性の評価および
機構総合
(2) パラレルロボットの対偶すきまを考慮した動力学解析
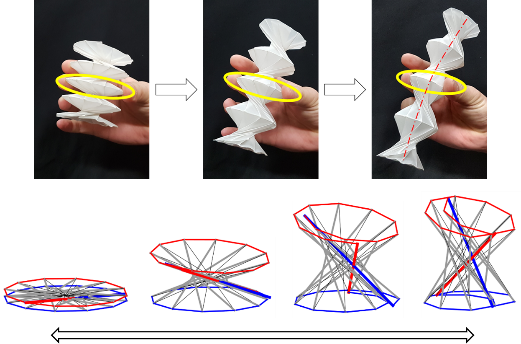
(3) 折り紙の運動解析モデルと特性解析
(4) ワイヤ駆動系のキャリブレーション手法
A2. 人間‐機械システムの運動学的,動力学的モデル化と設計手法
(1) ダイナミックペアに基づく人間-支援装置系の解析・設計手法
(2) 高齢者の安定な移動を支援する支持物(杖,手すりなど)の評価,設計
(3) リハビリテーション機器,動作支援機器の人体への装着特性を考慮したモデル化,運動力学解析と設計
A3. 新しい人間‐機械システムの提案,機構と制御の設計
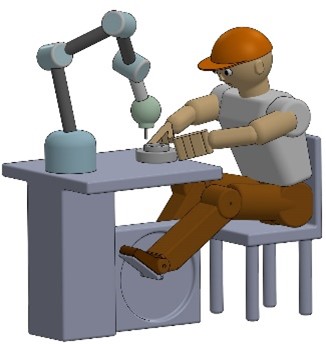
(1) 人力ロボティクス(2012~継続中)
“Powered by human, controlled by computer” - 安全・快適・持続可能な人間の運動と,物理的作業の自動化・ロボット化を両立する人間機械システムの研究
B. 応用研究
B1. パラレルメカニズム,ワイヤ駆動機構を用いたロボットの開発
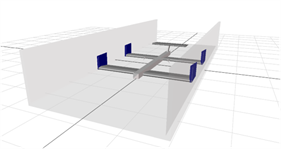
(1) パラレルワイヤ機構を用いた地震動シミュレータ(継続中)
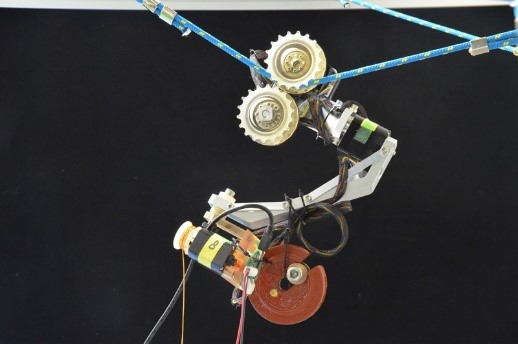
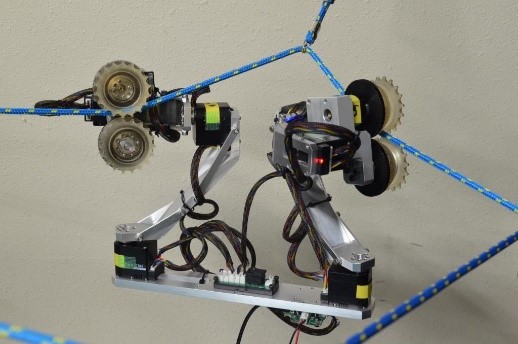
(2) 網状索道自走ロボットとこれを用いた可変構造パラレルワイヤ機構(2017~継続中)
ケーブルをクモの巣状に相互接続した「網状索道」の上を自走するロボット,および複数の自走ロボットからワイヤを繰り出すことで構成する,ワイヤ操出点を空間的に移動させることができる構造可変型パラレルワイヤ機構
B2. 福祉機器の開発
(1) 高齢者向け下肢操作式パーソナルモビリティ(2017~継続中)
(2) 上肢・下肢リハビリテーション装置
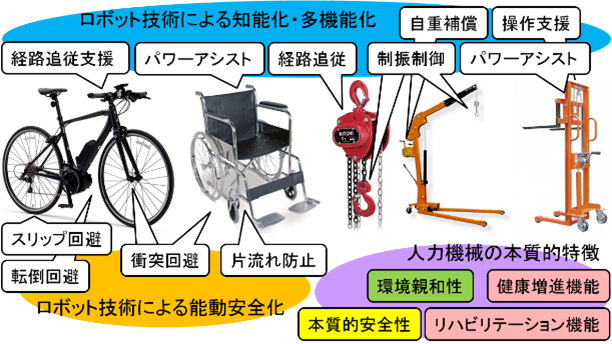
(3) 歩行支援装置・転倒回避機器
(4) 装着形抱き上げ支援装置
B3. 高機能機械要素(アクチュエータ,動力伝達系,パワーリザーバ,ブレーキ,軸受等)の開発
(1) 支援装置用アクチュエータの開発
Assist As Neededのコンセプトに基づく新しいアクチュエータRedundant Hybrid Actuator
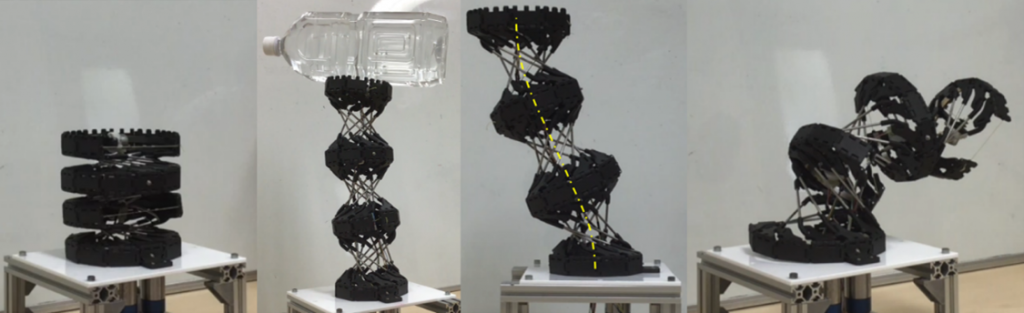
(2) 二重らせん構造を持つ弾性ジョイント・能動弾性ジョイント(~2018)
(3) パワーアシスト駆動系
(4) その他の駆動系
(1) ワイヤ駆動型連続体ロボット
(2) 弾性ロッド駆動型連続体ロボット
(3) 狭隘空間での力作業が可能な連続体伸展アーム 折り紙に着想を得た多自由度剛体伸展アーム
(4) その他の展開・適応機構
B5. メカトロニクスシステムの開発
(1) 空力浮上式鉄道「エアロトレイン」の機体設計に関する研究

(2) 3次元磁気テザーに基づく非接触マニピュレーションシステム
(3) AMT機構のダイナミクスと設計
過去の研究
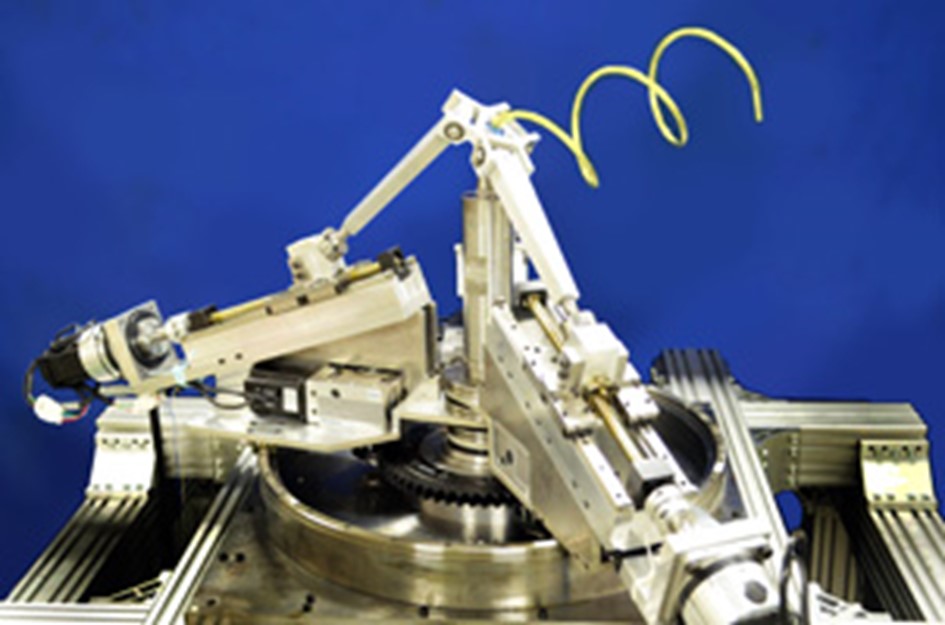
パラレルメカニズムの運動学解析,力学解析,特異点解析手法を用いた,大出力・高精度なパイプベンダーの総合・設計,画像計測を用いたオンマシンキャリブレーション手法,パイプの把持・送り装置の開発,極限環境(真空,塵埃,高・低温等)で使用可能な弾性ジョイントの開発など
下肢障碍者・高齢者の日常生活環境での移動を,直立姿勢を維持しつつ安全に支援できる松葉杖形歩行支援機械,関節に過剰な負荷を掛けないリハビリテーション装置など

C. 冗長・可変剛性ロボット機構の開発
冗長機構にばね等の受動弾性要素を組み合わせた弾性冗長機構の設計と応用.マニピュレータや脚として利用可能な,出力位置と剛性の同時制御が可能な可変剛性機構の開発